
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Penggao Yan
Trusted autonomy researcher at The Hong Kong Polytechnic University, building reliable navigation, integrity monitoring, and uncertainty-aware localization systems.
Posts
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
ION ITM 2023
Published:
Attend ION ITM 2023 (24-27 April 2023, Long Beach, CA)
IEEE/ION PLANS 2023
Published:
Attend IEEE/ION PLANS 2023 (24-27 April 2023, Monterey, CA) 
ION ITM 2024
Published:
Invited Paper at ION ITM 2024 (22-25 Jan 2024, Long Beach, CA) 
Pacific PNT 2024
Published:
Attend Pacific PNT 2024 (16-18 April 2024, Honolulu, Hawaii) 
ION GNSS+ 2024 Best Student Paper Award
Published:
Won the “ION GNSS+ Student Paper Award” in the 37th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2024) 
IEEE IV 2025
Published:
Attend the 3rd iLoc Workshop in IEEE Intelligent Vehicles Symposium (IV) 2025 (22-25 June 2025, Cluj-Napoca, Romania) 
publications
Integration of Vehicle Dynamic Model and System Identified Model for Navigation in Autonomous Mobile Robots
Published in International Technical Meeting 2023, 2023
Sensor-free localization under extreme conditions 
DOI | Download Paper | Slides
Extending Navigation Service under Sensor Failures: An Approach by Integrating System Identification and Vehicle Dynamic Model
Published in 2023 IEEE/ION Position, Location and Navigation Symposium (PLANS), 2023
Introduce the online system identification 
DOI | Download Paper | Slides
Integration of Vehicle Dynamic Model and System Identification Model for Extending the Navigation Service Under Sensor Failures
Published in IEEE Transactions on Intelligent Vehicles, 2023
Integration of system identification and vehicle dynamic models 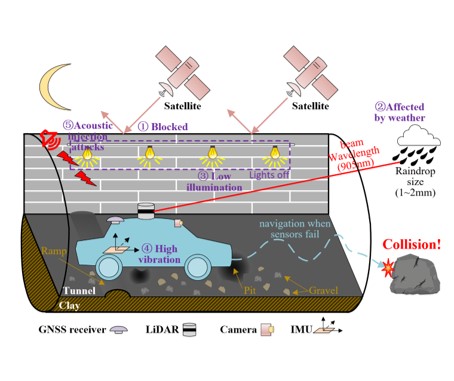
A Fault Detection Algorithm for LiDAR/IMU Integrated Localization Systems with Non-Gaussian Noises
Published in International Technical Meeting 2024, 2024
Detecting faulty measurements in EKF-based LiDAR/IMU integrated localization systems under non-Gaussian nominal error
DOI | Download Paper | Slides
Bounding the Heavy-tailed DGNSS Error by Leveraging Membership Weights Analysis of Gaussian Mixture Model
Published in Pacific PNT 2024, 2024
Non-Gaussian overbound for heavy-tailed DGNSS error 
Subspace-based Adaptive GMM Error Modeling for Fault-Aware Vehicular GNSS Positioning in Urban Canyons
Published in IEEE Transactions on Intelligent Vehicles, 2024
Simultaneous adaptive error modeling and fault detection and exclusion 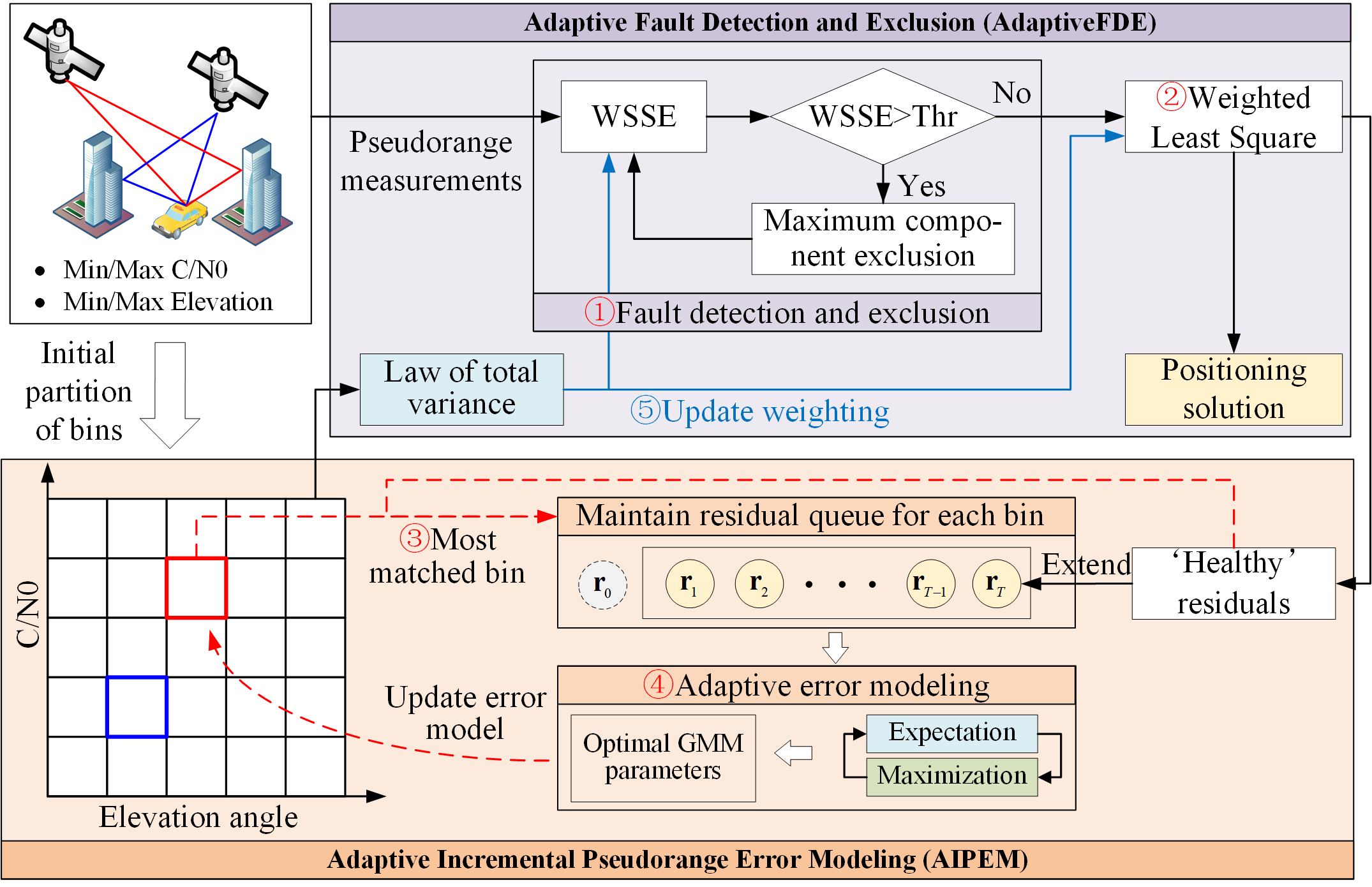
Principal Gaussian Overbound for Heavy-tailed Error Bounding
Published in IEEE Transactions on Aerospace and Electronic Systems, 2024
A conservative yet sharp non-Gaussian overbound for heavy-tailed error distributions 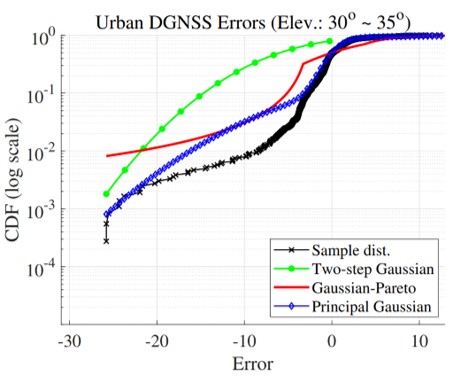
Jackknife test for faulty GNSS measurements detection under non-Gaussian noises
Published in ION GNSS+ 2024, 2024
Theoretically-guaranteed non-Gaussian detector 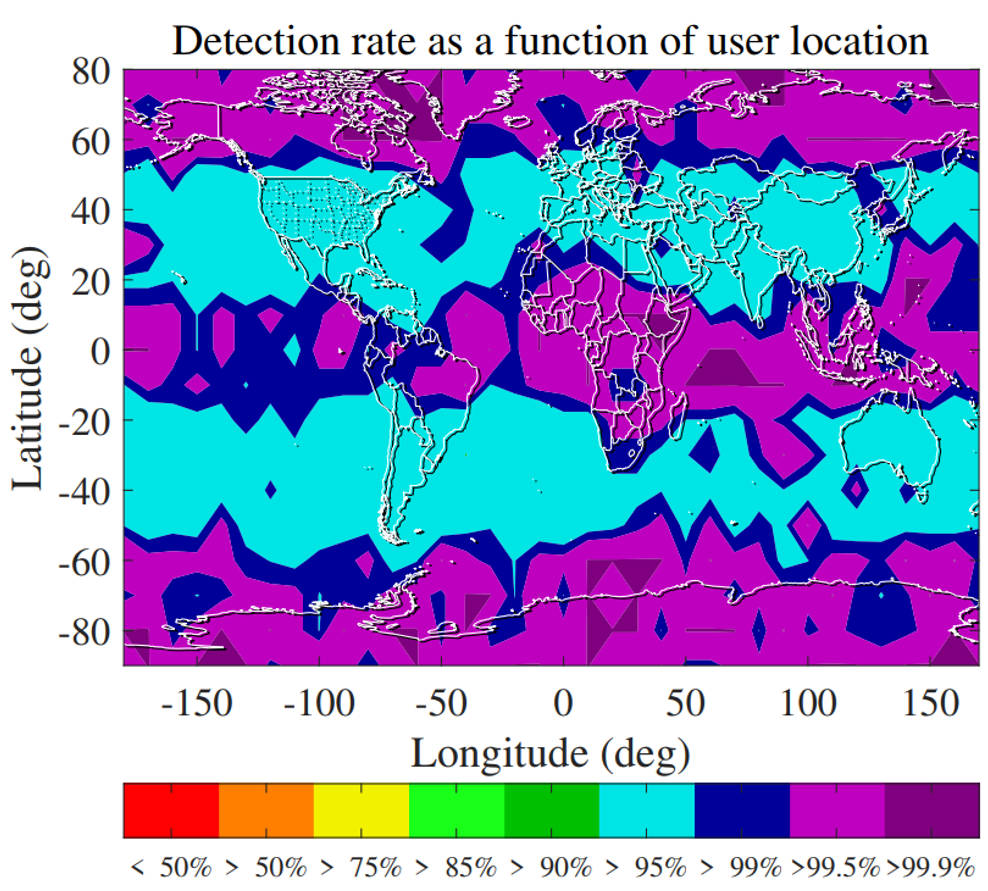
DOI | Download Paper | Slides
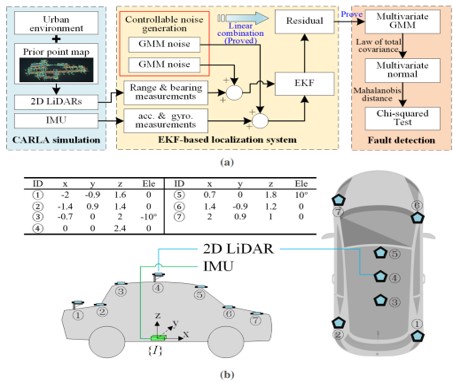
Fault Detection Algorithm for Gaussian Mixture Noises:An Application in LiDAR/IMU Integrated Localization System
Published in NAVIGATION: Journal of the Institute of Navigation, 2024
Multiple Faults Isolation For Multi-Constellation GNSS Positioning through Incremental Expansion of Consistent Measurements
Published in IEEE Sensors Journal, 2024
An expanding approach to detect and isolate multiple faulty measurements in pseudorange-based positioning systems 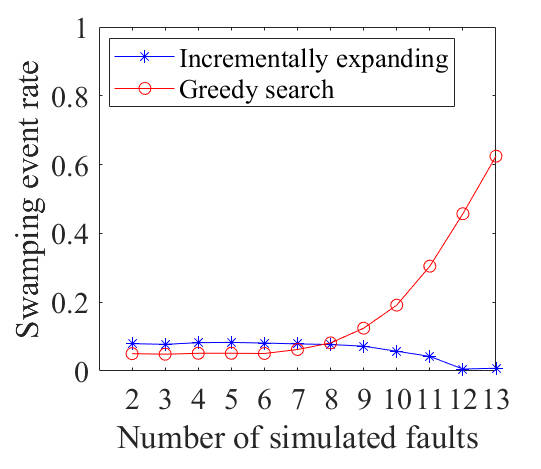
Cauchy-Gaussian Overbound for Heavy-tailed GNSS Measurement Errors
Published in NAVIGATION: Journal of the Institute of Navigation, 2026
Leveraging the bounding sharpness of the Cauchy distribution in the core and the Gaussian distribution in the tails to tightly bound heavy-tailed GNSS measurement errors 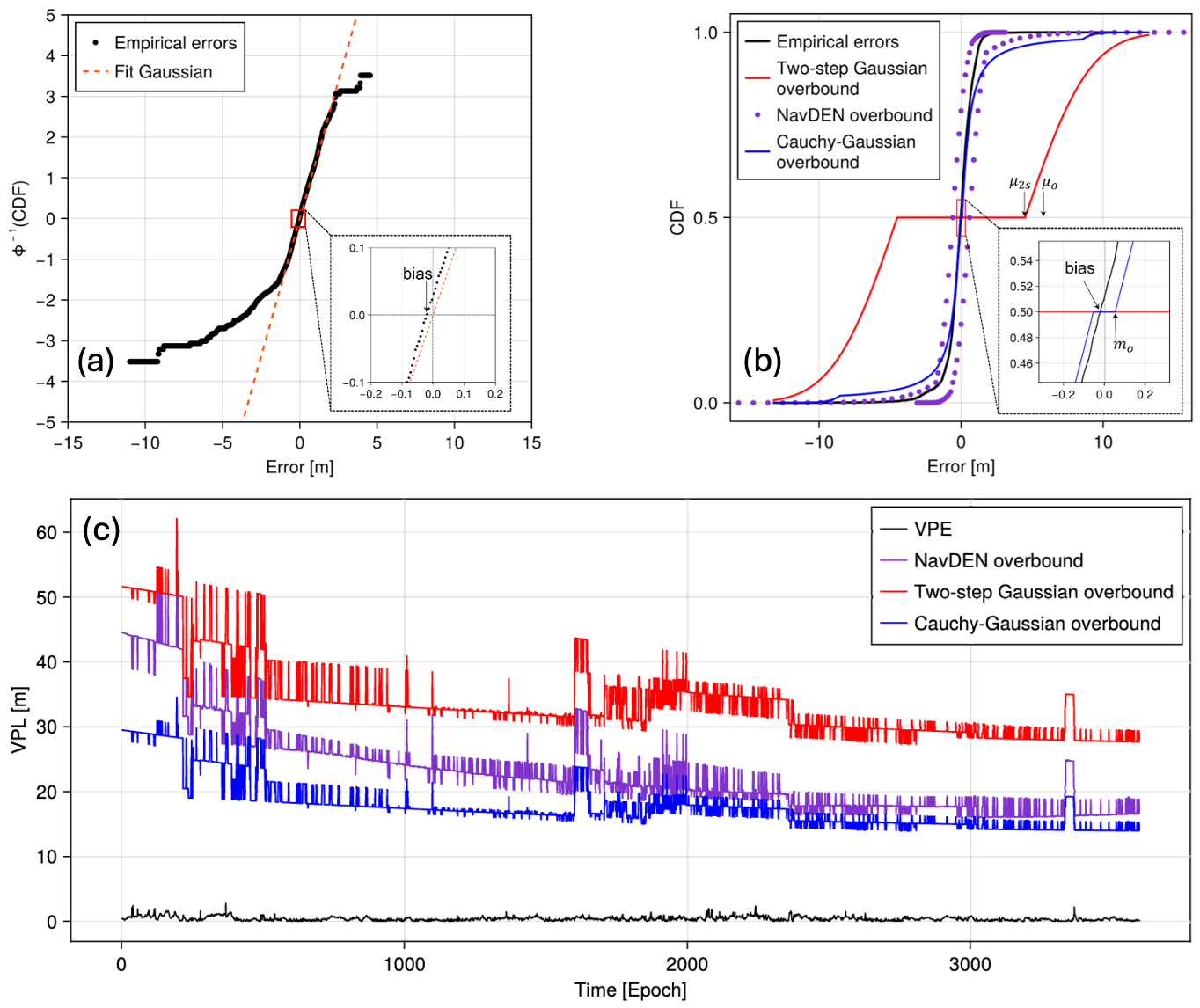
Jackknife ARAIM: Efficient GNSS Integrity Monitoring for Simultaneous Faults under Non-Gaussian Errors
Published in Aerospace Systems, 2026
Efficient GNSS Integrity Monitoring for Simultaneous Faults under Non-Gaussian Errors 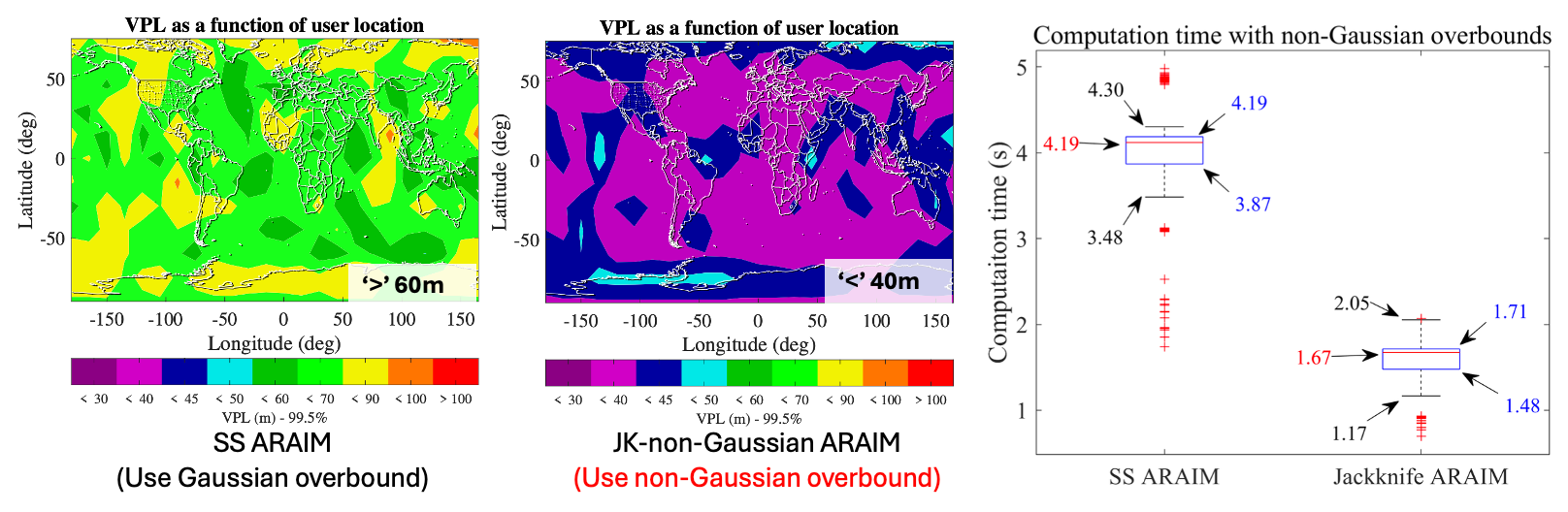
Credible Uncertainty Quantification under Noise and System Model Mismatch
Published in IEEE Transactions on Instrumentation and Measurement, 2026
Unified NCI, NLL, and ES framework with empirical location test (ELT) and directional probing to diagnose noise vs. system model mismatch 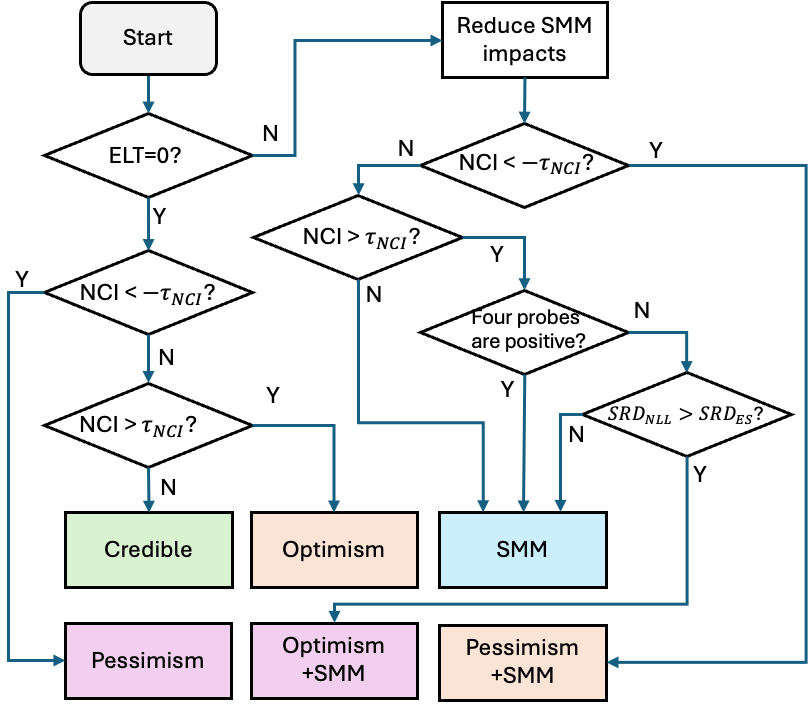
Improved GNSS Positioning in Urban Environments Using a Logistic Error Model
Published in ArXiv, 2026
Logistic pseudorange errors and the Least Quasi-Log-Cosh (LQLC) M-estimator with IRLS for urban GNSS, validated in light, medium, and deep urban Hong Kong data 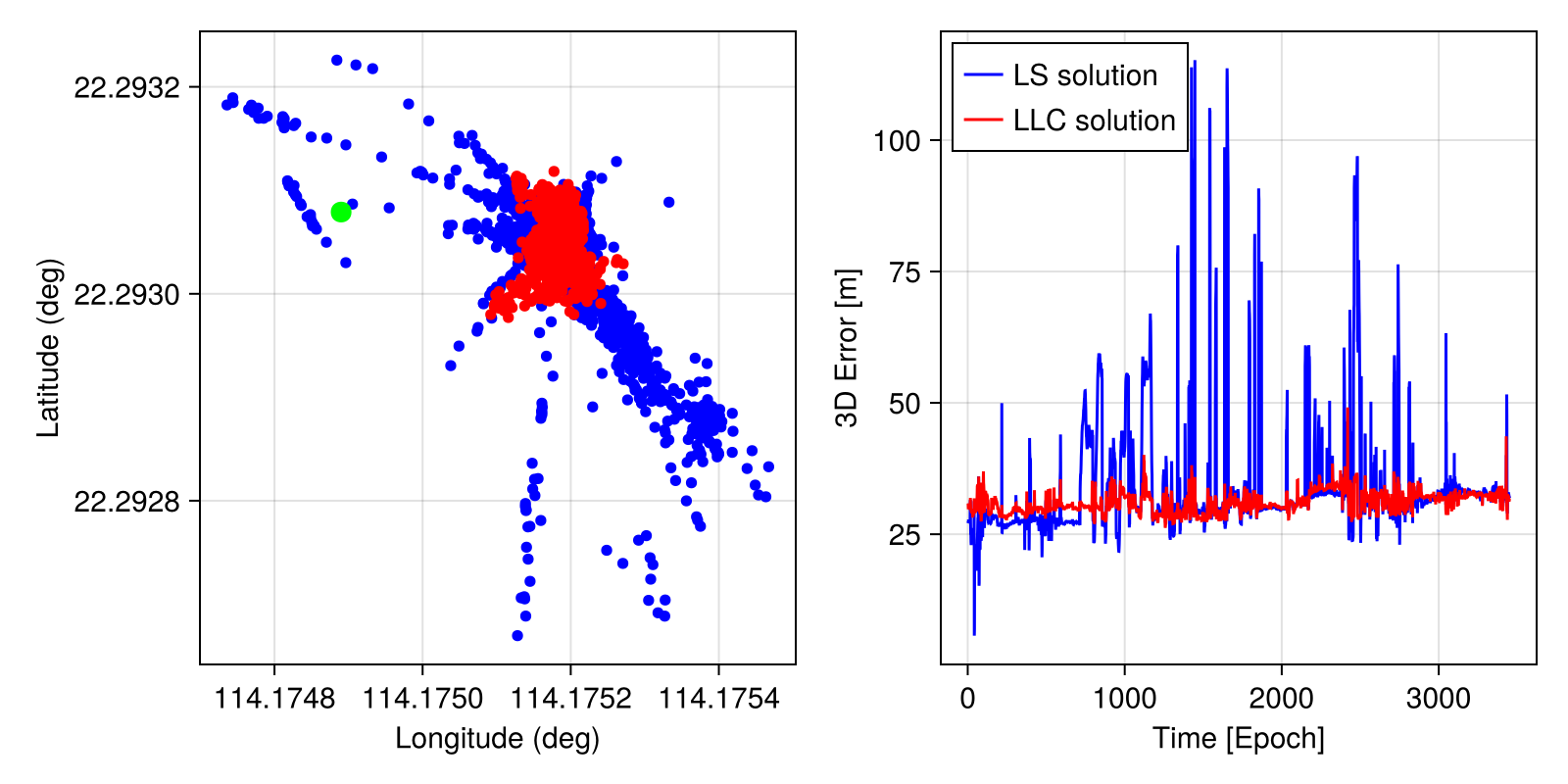
Logistic-aided Huber M-estimator for robust GNSS positioning
Published in ArXiv, 2026
Score-matched mapping from logistic quasi-log-cosh to Huber yields closed-form tuning σᵢ = √2 sᵢ, cᵢ = √2; validated in simulation and urban GNSS data 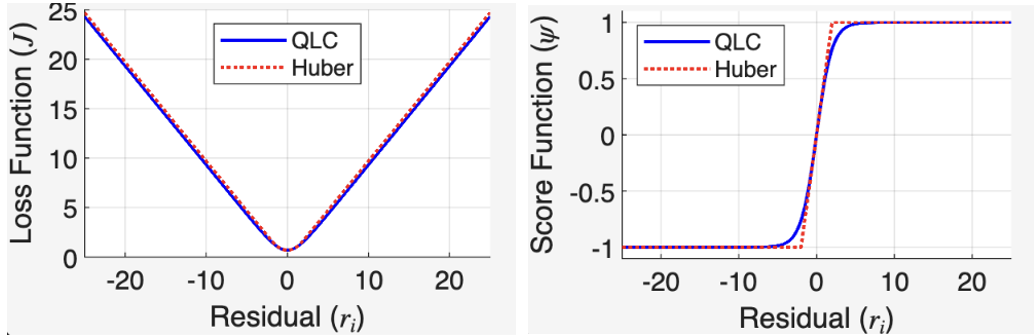
talks
Integration of Vehicle Dynamic Model and System Identified Model for Navigation in Autonomous Mobile Robots
Published:
This presentation introduced the early system-identification work that later developed into a broader research line on resilient localization under sensor failures.
Extending Navigation Service under Sensor Failures: An Approach by Integrating System Identification and Vehicle Dynamic Model
Published:
The talk connected system identification with a vehicle dynamic model to preserve useful navigation information when sensing degrades or fails.
A Fault Detection Algorithm for LiDAR/IMU Integrated Localization Systems with Non-Gaussian Noises
Published:
The presentation focused on the gap between textbook Gaussian assumptions and real localization errors, and on how a Gaussian-mixture treatment changes detection design.
Bounding the Heavy-Tailed Pseudorange Error by Leveraging Membership Weights Analysis of Gaussian Mixture Model
Published:
This conference contribution developed the overbounding thread that later led to sharper non-Gaussian integrity models.
Jackknife Test for Faulty GNSS Measurements Detection under Non-Gaussian Noises
Published:
The talk presented a computationally efficient alternative to conventional solution-separation detection while retaining theoretical guarantees under non-Gaussian nominal errors.
Towards Provably Reliable Uncertainty Quantification for Automotive State Estimation
Published:
The workshop brought integrity ideas from aviation and GNSS into the broader challenge of reliable localization, mapping, and perception for automated vehicles.
Conference Presentation at ICASSE 2025
Published:
This entry records the ICASSE 2025 presentation currently listed in the site news archive. The talk title and event materials can be added when they are available.
Credible Uncertainty Quantification in Multi-Sensor Fusion
Published:
The talk connected statistical consistency checks, proper scoring rules, and model-diagnosis tools for multisensor estimation systems.
Lightweight GNSS DPE/INS Integration Using Google Smartphone Decimeter Challenge Dataset
Published:
The contribution used inertial priors to constrain the direct-position-estimation search space, improving robustness and efficiency on real smartphone data.
Challenges and Lessons in Assessing the DGPS Positioning Credibility for Landslides Monitoring
Published:
The presentation showed how an empirical location test and covariance-consistency checks can distinguish systematic bias from noise-model mismatch in remote monitoring networks.
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.