
Integration of Vehicle Dynamic Model and System Identification Model for Extending the Navigation Service Under Sensor Failures
Published in IEEE Transactions on Intelligent Vehicles, 2023
1) What problem is this paper solving?
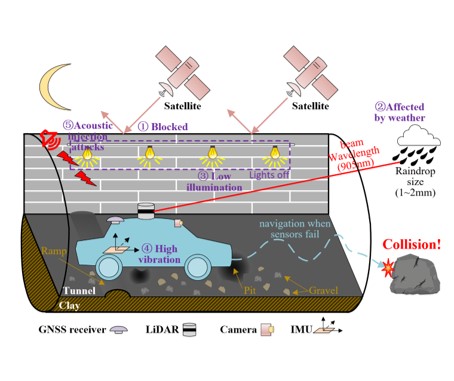
Context: Sensors (GNSS/Camera) fail in extreme conditions (outages, spoofing); VDM drifts quickly.
Core contribution: A sensor-free localization method integrating online System Identification (SI) with VDM.
Achieved goal: Accurate, extended positioning service during complete sensor outages.
2) Why is this paper important?
What changed: Autonomous vehicles need redundancy when primary sensors fail.
Problem created: Standard Vehicle Dynamic Models (VDM) are inaccurate due to modeling errors.
Why current solutions fail: They rely on pre-calibrated parameters that don’t match real-time dynamics.
3) How does this paper solve it?
Contribution 1: Uses online SI to learn real-time powertrain and steering dynamics.
Contribution 2: Feeds identified responses as control inputs to the VDM.
Key result: Reduced mean absolute translation error by 70% compared to conventional VDM.
🎯 Takeaway: Learning the vehicle’s physics in real-time allows it to navigate blindly when sensors fail.
DOI: https://doi.org/10.1109/TIV.2023.3273185
Recommended citation:
Yan, P., Wen, W., & Hsu, L. T. (2023). "Integration of Vehicle Dynamic Model and System Identification Model for Extending the Navigation Service Under Sensor Failures". IEEE Transactions on Intelligent Vehicles, 9(1), 2236-2248, https://doi.org/10.1109/TIV.2023.3273185
BibTeX
@article{yan2023si,
author = {Yan, Penggao and Wen, Weisong and Hsu, Li-Ta},
title = {Integration of Vehicle Dynamic Model and System Identification Model for Extending the Navigation Service Under Sensor Failures},
journal = {IEEE Transactions on Intelligent Vehicles},
year = {2023},
volume = {9},
number = {1},
pages = {2236--2248},
doi = {10.1109/TIV.2023.3273185}
}