
Subspace-based Adaptive GMM Error Modeling for Fault-Aware Vehicular GNSS Positioning in Urban Canyons
Published in IEEE Transactions on Intelligent Vehicles, 2024
1) What problem is this paper solving?
Context: Fixed static error models fail in dynamic urban environments where multipath varies.
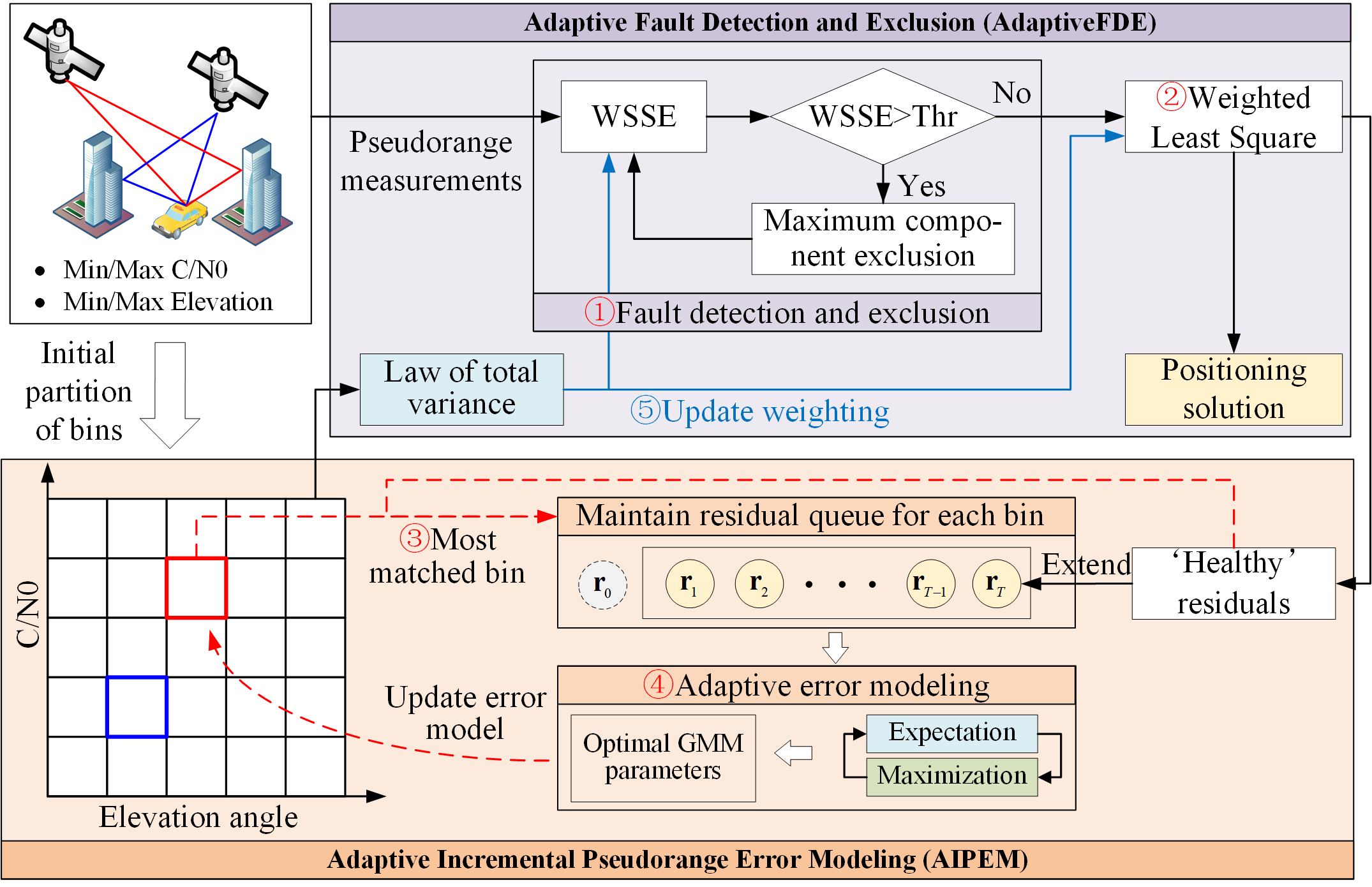
Core contribution: A subspace-based adaptive Gaussian Mixture Model (GMM) that updates in real-time.
Achieved goal: Improved Fault Detection and Exclusion (FDE) and positioning accuracy in urban canyons.
2) Why is this paper important?
What changed: Vehicles move through rapidly changing environments (open sky to deep urban).
Problem created: Static models are either too optimistic (miss faults) or too pessimistic (false alarms).
Why current solutions fail: They cannot adapt to the instantaneous severity of multipath and NLOS.
3) How does this paper solve it?
Contribution 1: Divides measurement space into sub-bins based on elevation and C/N0.
Contribution 2: Dynamically updates GMM error profiles for each bin and excludes abnormal measurements over a sliding window.
Key result: Reduced mean positioning error by 9-16% in real-world urban datasets.
🎯 Takeaway: Dynamic environments need dynamic error models; adapting GMMs in real-time solves this.
DOI: https://doi.org/10.1109/TIV.2024.3450198
Recommended citation:
Yan, P., Xia, X., Brizzi, M., Wen, W., & Hsu, L. T. (2024). "Subspace-based Adaptive GMM Error Modeling for Fault-Aware Pseudorange-based Positioning in Urban Canyons". IEEE Transactions on Intelligent Vehicles, http://dx.doi.org/10.1109/TIV.2024.3450198
BibTeX
@article{yan2024adaptive,
author = {Yan, Penggao and Xia, Xiaoxuan and Brizzi, Marco and Wen, Weisong and Hsu, Li-Ta},
title = {Subspace-based Adaptive GMM Error Modeling for Fault-Aware Pseudorange-based Positioning in Urban Canyons},
journal = {IEEE Transactions on Intelligent Vehicles},
year = {2024},
doi = {10.1109/TIV.2024.3450198}
}