
Jackknife ARAIM: Efficient GNSS Integrity Monitoring for Simultaneous Faults under Non-Gaussian Errors
Published in Aerospace Systems, 2026
1) What problem is this paper solving?
Context: Solution Separation (SS) ARAIM usually assumes Gaussian errors, leading to conservative protection levels in reality.
Core contribution: A non-Gaussian ARAIM framework using jackknife test to handle non-Gaussian errors efficiently.
Achieved goal: Theoretically equivalent to SS ARAIM but with higher efficiency and tighter bounds.
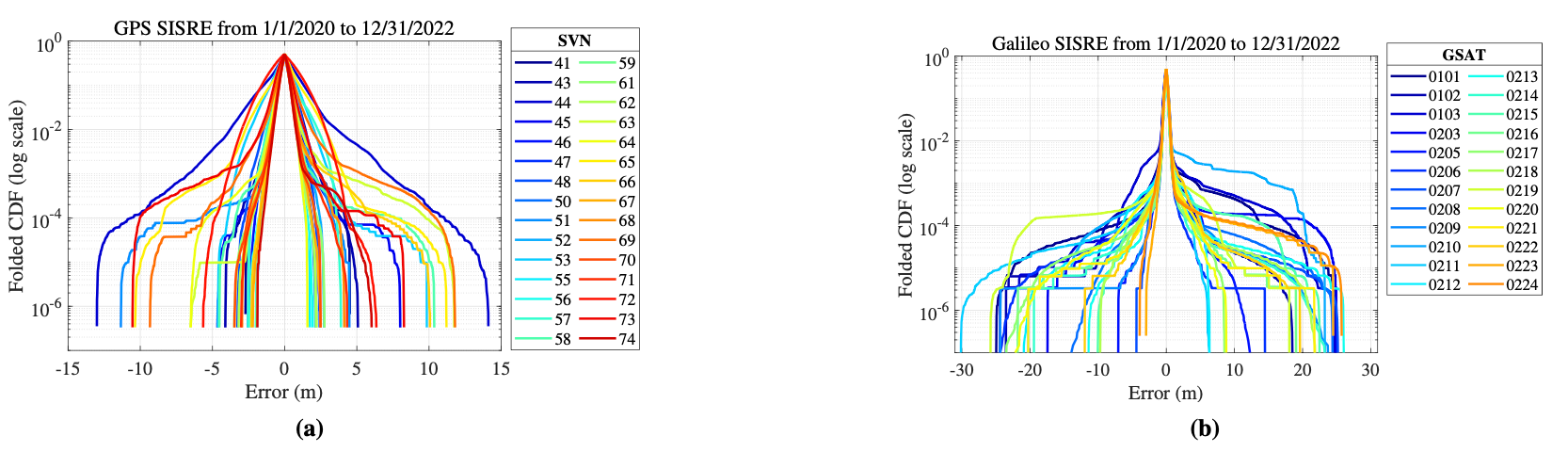 The folded CDF of (a) GPS and (b) Galileo SISRE for individual satellites from January 1st, 2020 to December 31st, 2022. A significant non-Gaussian pattern is observed.
The folded CDF of (a) GPS and (b) Galileo SISRE for individual satellites from January 1st, 2020 to December 31st, 2022. A significant non-Gaussian pattern is observed.
2) Why is this paper important?
What changed: Real-world errors are non-Gaussian; existing multi-hypothesis fixes are too slow.
Problem created: We trade off either safety (Gaussian assumption) or computational feasibility (MHSS).
Why current solutions fail: They cannot handle simultaneous faults under non-Gaussian noise efficiently.
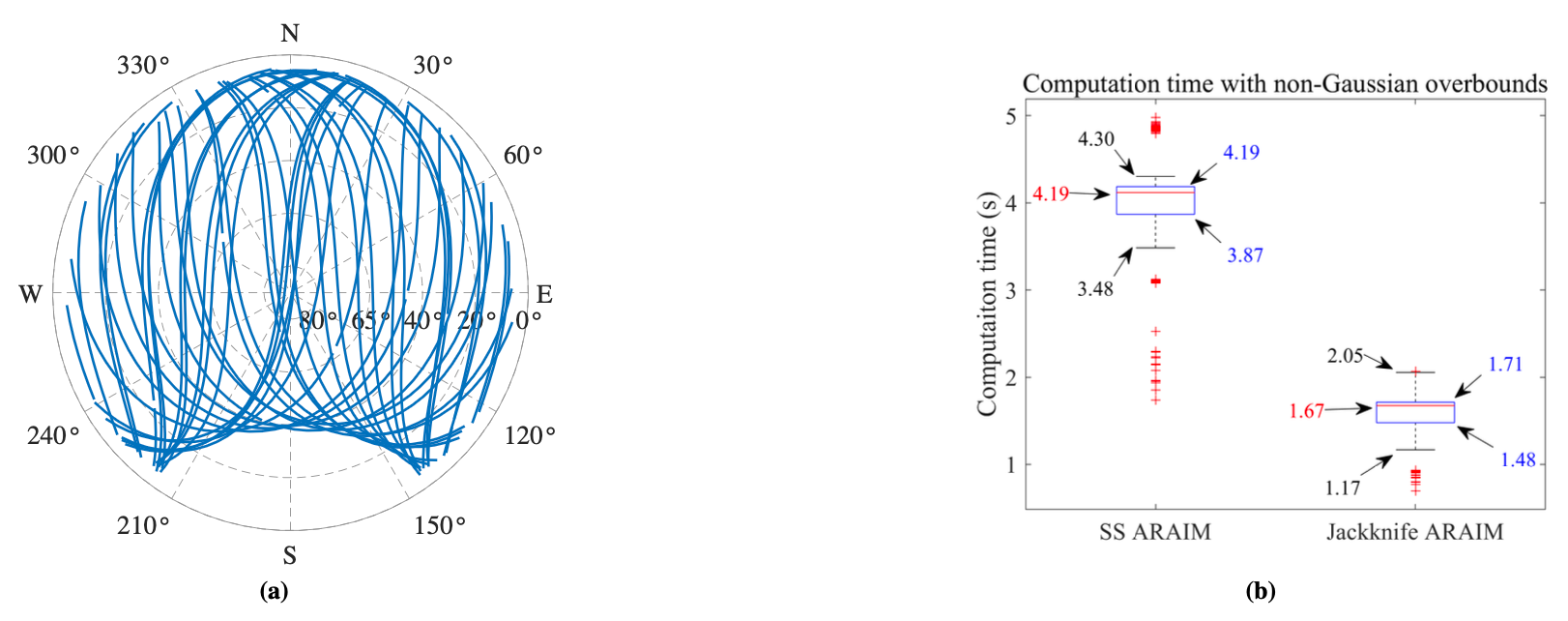 Computation time comparison for GPS-only constellation: (a) Trajectories of GPS satellites over a 24-hour period; (b) The box plot of computation times for jackknife and SS ARAIM methods both with non-Gaussian overbounds.
Computation time comparison for GPS-only constellation: (a) Trajectories of GPS satellites over a 24-hour period; (b) The box plot of computation times for jackknife and SS ARAIM methods both with non-Gaussian overbounds.
3) How does this paper solve it?
Contribution 1: Uses fast scalar jackknife tests for single faults and triple-axis combinations for multi-faults.
Contribution 2: Incorporates non-Gaussian overbounding to safely model heavy tails.
Key result: Reduced 99.5th percentile Vertical Protection Level (VPL) below 40m (vs 60m for Gaussian) under GPS-Galileo dual constellation while being faster.
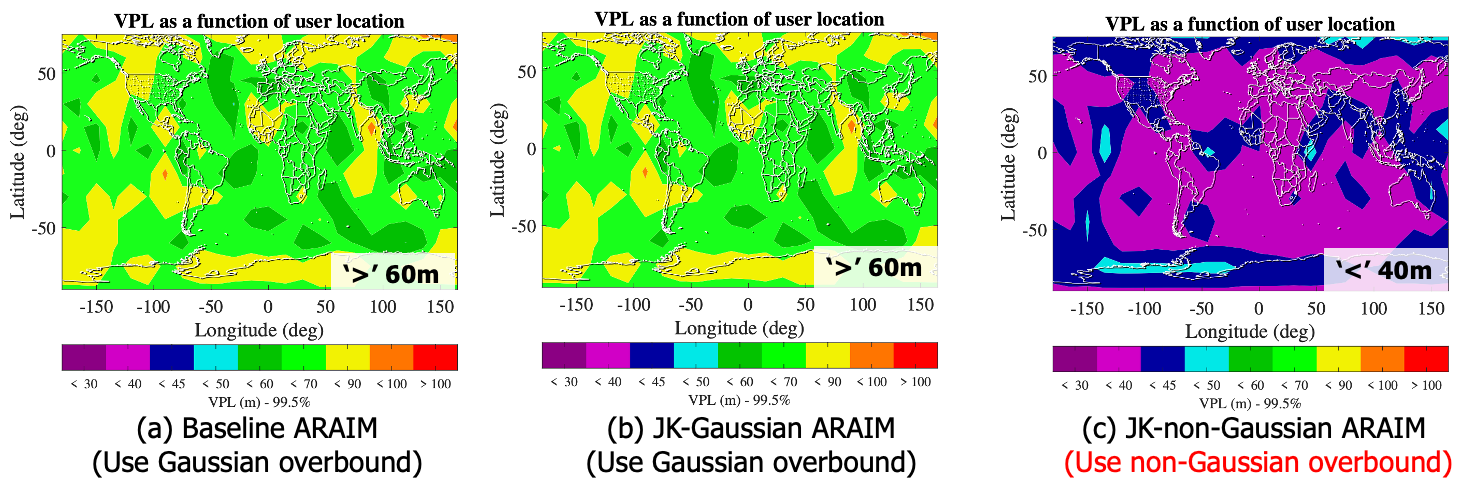 99.5 percentile of the VPL over the course of the day yielded by (a) the SS ARAIM with Gaussian overbounds; (b) the proposed jackknife ARAIM with Gaussian overbounds; and (c) the proposed jackknife ARAIM with non-Gaussian overbounds for the GPS-Galileo dual constellation.
99.5 percentile of the VPL over the course of the day yielded by (a) the SS ARAIM with Gaussian overbounds; (b) the proposed jackknife ARAIM with Gaussian overbounds; and (c) the proposed jackknife ARAIM with non-Gaussian overbounds for the GPS-Galileo dual constellation.
🎯 Takeaway: Jackknife ARAIM offers a faster, tighter, and distribution-free path to high-integrity navigation.
Recommended citation:
Yan, P., Jin, R., Zhang, J., Wang, C., & Hsu, L. T. (2026). "Jackknife ARAIM: Efficient GNSS Integrity Monitoring for Simultaneous Faults under Non-Gaussian Errors". Aerospace Systems.
BibTeX
@article{yan2026jackknife,
author = {Yan, Penggao and Jin, Ronghe and Zhang, Junyi and Wang, Cheng-Wei and Hsu, Li-Ta},
title = {Jackknife ARAIM: Efficient GNSS Integrity Monitoring for Simultaneous Faults under Non-Gaussian Errors},
journal = {Aerospace Systems},
year = {2026},
}