
Improved GNSS Positioning in Urban Environments Using a Logistic Error Model
Published in ArXiv, 2026
1) What problem is this paper solving?
Context: Least squares (LS) follows from a Gaussian error model, but multipath and NLOS in cities produce heavy-tailed errors that Gaussian tails underestimate.
Core contribution: Model errors with a logistic distribution and derive the corresponding MLE—the Least Quasi-Log-Cosh (LQLC) estimator—solved with iteratively reweighted least squares (IRLS).
Achieved goal: A simple, tractable alternative to Gaussian LS that better matches urban error tails and down-weights large residuals.
2) Why is this paper important?
What changed: Urban GNSS needs estimators aligned with heavy-tailed measurement error behavior without model complexity or extra sensors.
Problem created: Gaussian model remains sensitive to large residuals that occur more often than the model allows.
Why current solutions help but differ: Context maps and NLOS mitigation techniques add cost; without introducing extra sensors, we propose to use a new statistical model with closed-form estimator and efficient solver.
3) How does this paper solve it?
Contribution 1: Analysis on real measurement error samples (light, medium, deep urban in Hong Kong) show that logistic distribution can fit better than Gaussian while staying simpler than BGMM or Student’s-t for estimator design.
Contribution 2: LQLC minimizes \(\sum_i \ln(\cosh(\bar{r}_i)+1)\); weights \(w(r)=\tanh(r/2)/r\) shrink influence for large normalized residuals.
Contribution 3: Real SPP tests (GPS + Beidou L1, u-blox F9P vs. SPAN-CPT truth): 3D RMSE improves by about 11%–31% and 3D STD by about 27%–61% vs. LS; runtime stays real-time compatible.
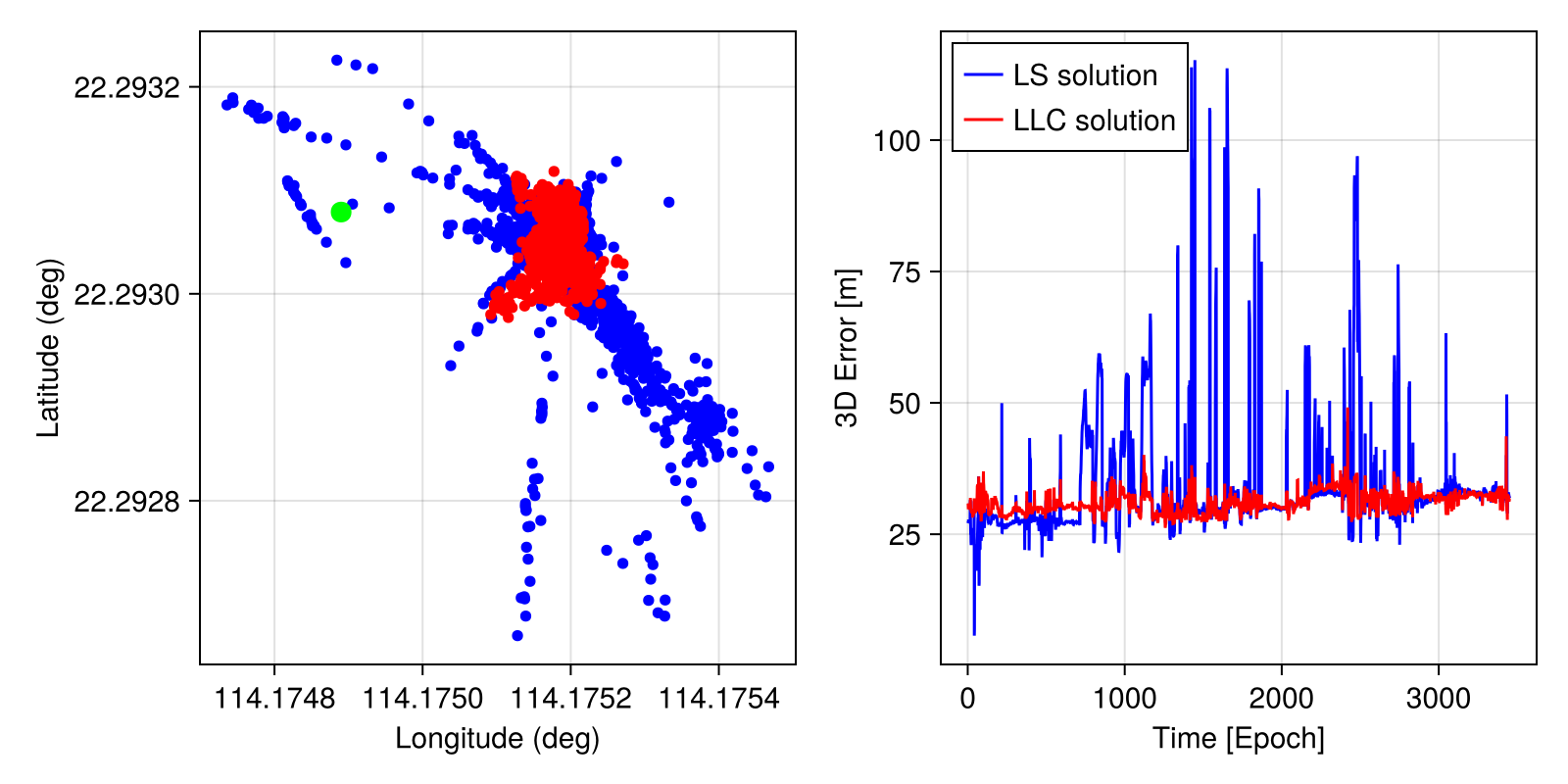 Positioning results of LQLC vs. LS on real urban GNSS data in Hong Kong.
Positioning results of LQLC vs. LS on real urban GNSS data in Hong Kong.
🎯 Takeaway: Logistic error modeling yields a practical robust urban GNSS estimator with clear tuning guidance and measured gains over LS across urban severity levels.
Recommended citation:
Li, Z., Yan, P., Song, B., & Hsu, L. T. (2026). "Improved GNSS Positioning in Urban Environments Using a Logistic Error Model". arXiv preprint arXiv:2603.16420.
BibTeX
@misc{li2026improved,
author = {Li, Zhengdao and Yan, Penggao and Song, Baoshan and Hsu, Li-Ta},
title = {Improved GNSS Positioning in Urban Environments Using a Logistic Error Model},
year = {2026},
eprint = {2603.16420},
archivePrefix = {arXiv},
primaryClass = {eess.SP}
}