01 Credible uncertainty
Credible Uncertainty Quantification under Noise and System Model Mismatch
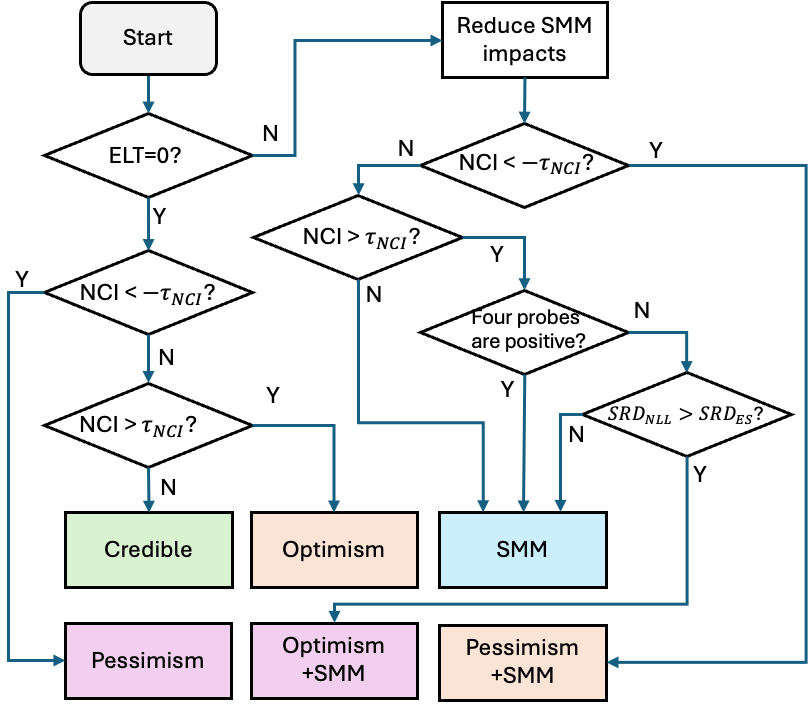
A unified, multi-metric framework that turns uncertainty-calibration failures into diagnoses of noise mismatch, covariance scaling, or system bias.

Research record
A curated set of five representative papers is followed by the complete publication record, organized by year. The selection emphasizes credible uncertainty, non-Gaussian integrity monitoring, and robust localization.
A unified, multi-metric framework that turns uncertainty-calibration failures into diagnoses of noise mismatch, covariance scaling, or system bias.
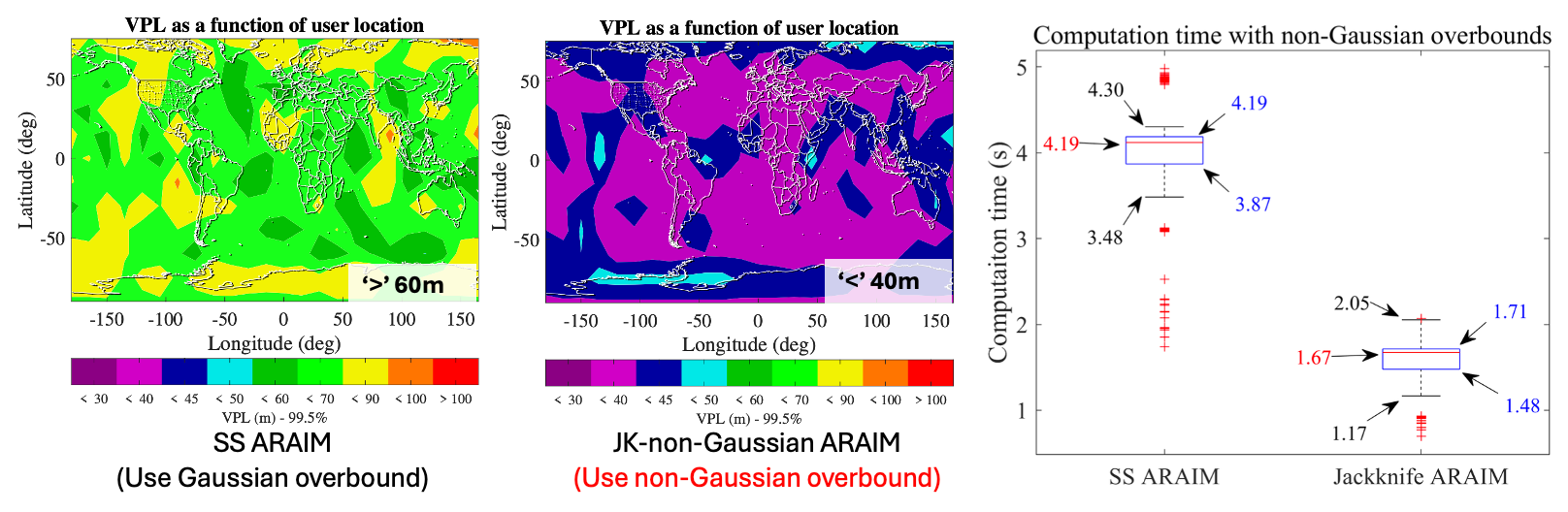
An efficient ARAIM framework for simultaneous faults under non-Gaussian errors, designed to tighten protection levels without sacrificing integrity.
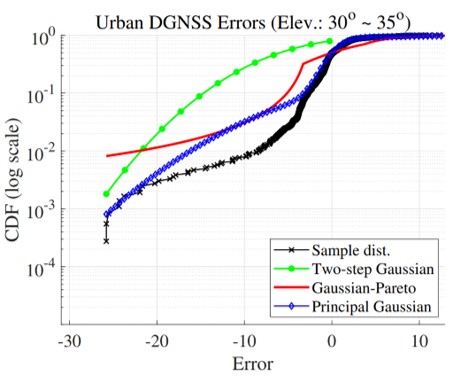
A conservative yet sharp Gaussian overbound for heavy-tailed errors, providing a practical statistical foundation for safety-critical navigation.
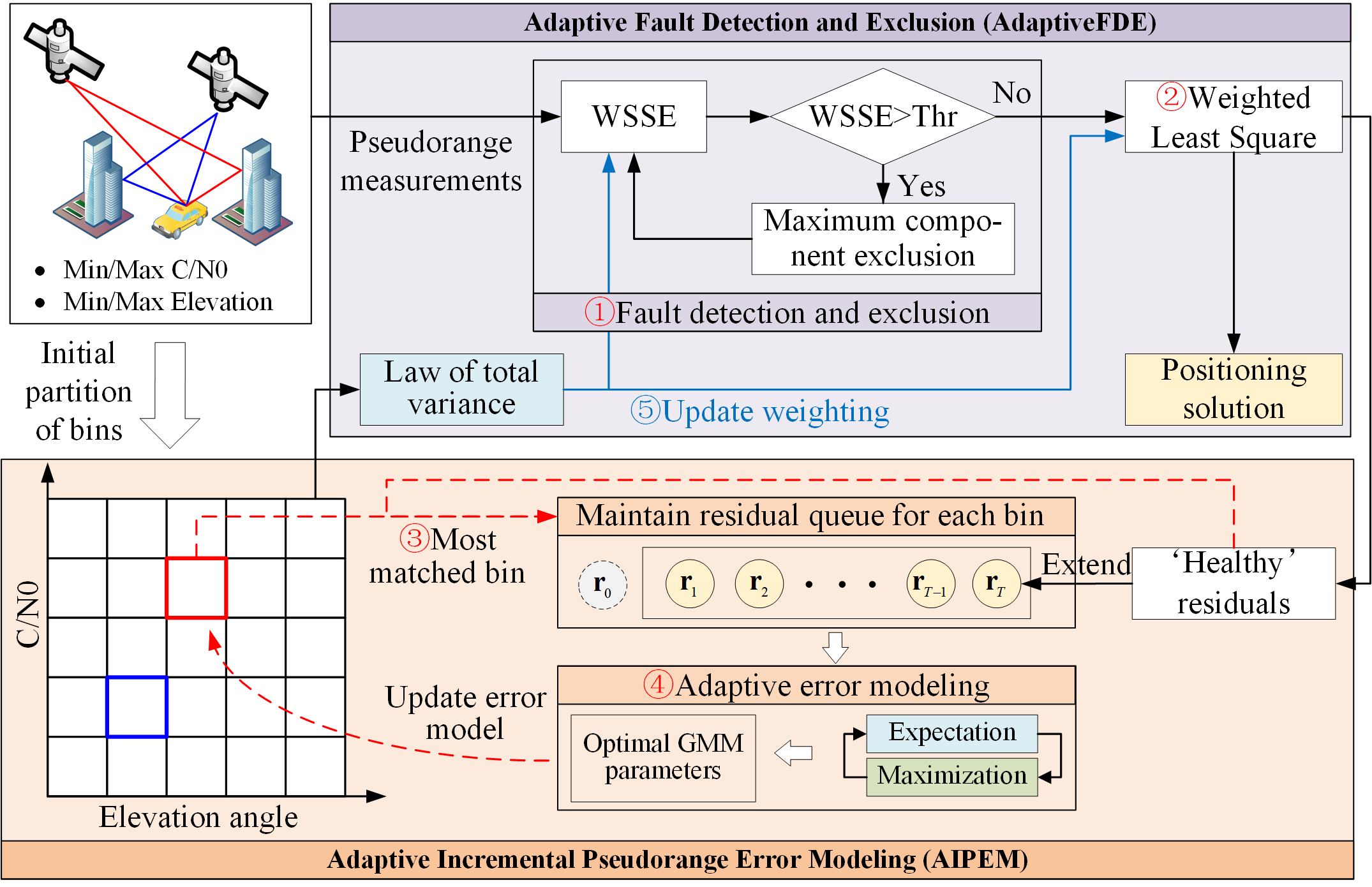
A subspace-based adaptive GMM that couples real-time error modeling with fault detection for vehicular positioning in urban canyons.
A theoretically grounded and computationally efficient detector for faulty GNSS measurements, recognized with an ION GNSS+ 2024 Student Paper Award.