
Principal Gaussian Overbound for Heavy-tailed Error Bounding
Published in IEEE Transactions on Aerospace and Electronic Systems, 2024
1) What problem is this paper solving?
Context: Heavy-tailed errors in urban GNSS ruin integrity monitoring if not properly bounded.
Core contribution: Principal Gaussian Overbound (PGO) utilizing Bimodal Gaussian Mixture Models (BGMM).
Achieved goal: A tight, safe, and convolution-preserving overbound for integrity.
2) Why is this paper important?
What changed: Urban navigation requires strict integrity, but errors are heavy-tailed.
Problem created: Single-Gaussian bounds must be hugely inflated to cover tails, destroying availability.
Why current solutions fail: They are either too loose (conservative) or lack theoretical guarantees for convolution.
3) How does this paper solve it?
Contribution 1: Proposed an conservative yet sharp non-Gaussian overbound method (PGO) and mathematically proved its overbounding property is preserved through convolution.
Contribution 2: Formalized the calculation of Protection Levels (PLs) using Fast Fourier Transforms (FFT) to significantly accelerate computation.
Key result: Reduced mean Vertical Protection Level (VPL) by over 50% compared to the two-step Gaussian method.
🎯 Takeaway: A smarter way to bound heavy tails that keeps protection levels low and integrity availability high.
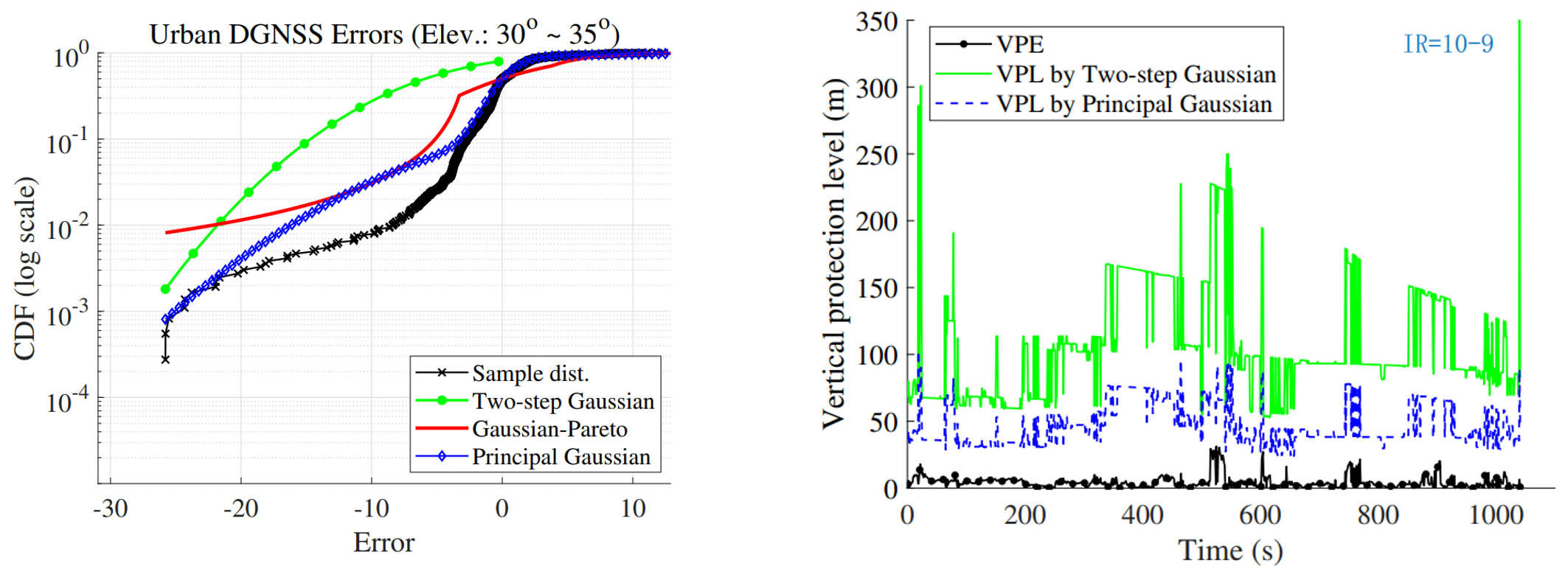
(a) The CDF (in logarithm scale) of the proposed method (Principal Gaussian overbound), the two-step Gaussian overbound, Gaussian-Pareto overbound for Urban DGNSS errors (heavy-tailed distribution); (b) The protection level of LS solution based on the proposed method (Principal Gaussian overbound) and the two-step Gaussian overbound when integrity risk is set as 10^-9.
DOI: https://doi.org/10.1109/TAES.2024.3448405
Recommended citation:
Yan, P., Zhong, Y., & Hsu, L. T. (2024). "Principal Gaussian Overbound for Heavy-tailed Error Bounding". IEEE Transactions on Aerospace and Electronic Systems, 61(1), 829-852, http://dx.doi.org/10.1109/TAES.2024.3448405
BibTeX
@article{yan2024pgo,
author = {Yan, Penggao and Zhong, Yang and Hsu, Li-Ta},
title = {Principal Gaussian Overbound for Heavy-tailed Error Bounding},
journal = {IEEE Transactions on Aerospace and Electronic Systems},
year = {2024},
volume = {61},
number = {1},
pages = {829--852},
doi = {10.1109/TAES.2024.3448405}
}