
A Fault Detection Algorithm for LiDAR/IMU Integrated Localization Systems with Non-Gaussian Noises
Published in International Technical Meeting 2024, 2024
1) What problem is this paper solving?
Context: Detecting faulty measurements in EKF-based systems under non-Gaussian nominal error.
Core contribution: A fault detection method using GMM noise modeling and a transformed test statistic.
Achieved goal: Improved sensitivity to small and slowly increasing faults.
2) Why is this paper important?
What changed: Sensor noise in complex environments is rarely Gaussian.
Problem created: Gaussian-based detectors miss subtle faults or react too slowly.
Why current solutions fail: Mismatch between the assumed (Gaussian) and actual (GMM) noise distribution.
3) How does this paper solve it?
Contribution 1: Models LiDAR range noise as GMM and proves the EKF measurement residual is also GMM.
Contribution 2: Derived a transformation using the law of total covariance to standardize GMM residuals for chi-squared testing.
Key result: Demonstrated superiority in detecting small faults compared to Gaussian methods.
🎯 Takeaway: Accurate noise modeling is the key to sensitive fault detection.
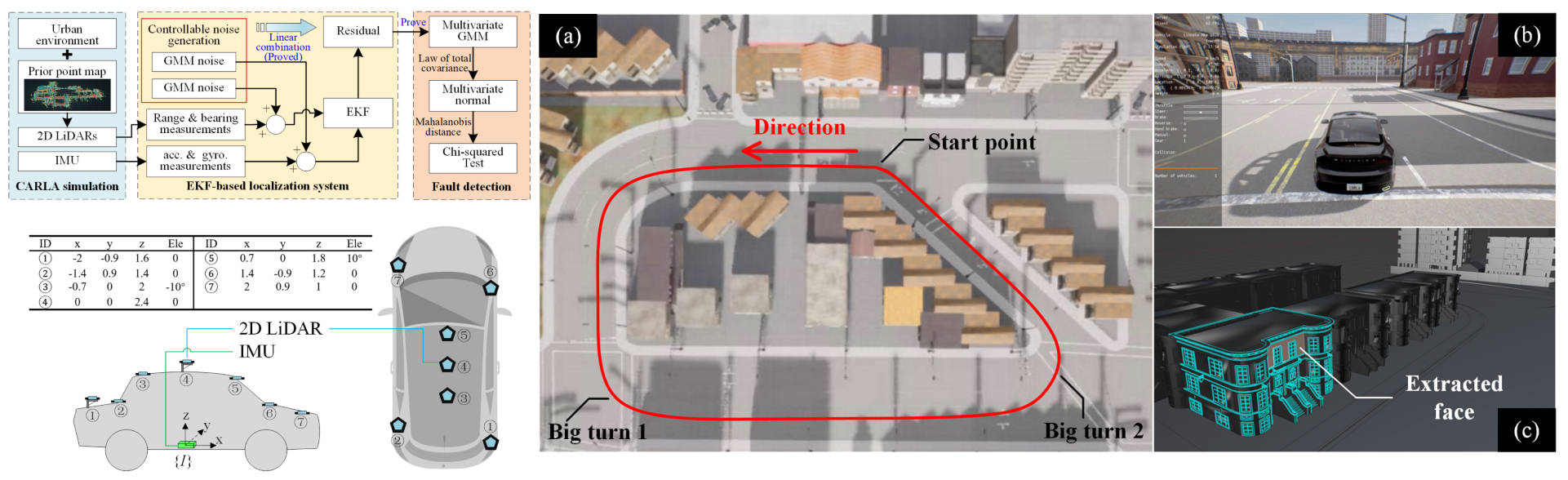 The architecture of the proposed method and the simulated environment where we apply the algorithm.
The architecture of the proposed method and the simulated environment where we apply the algorithm.
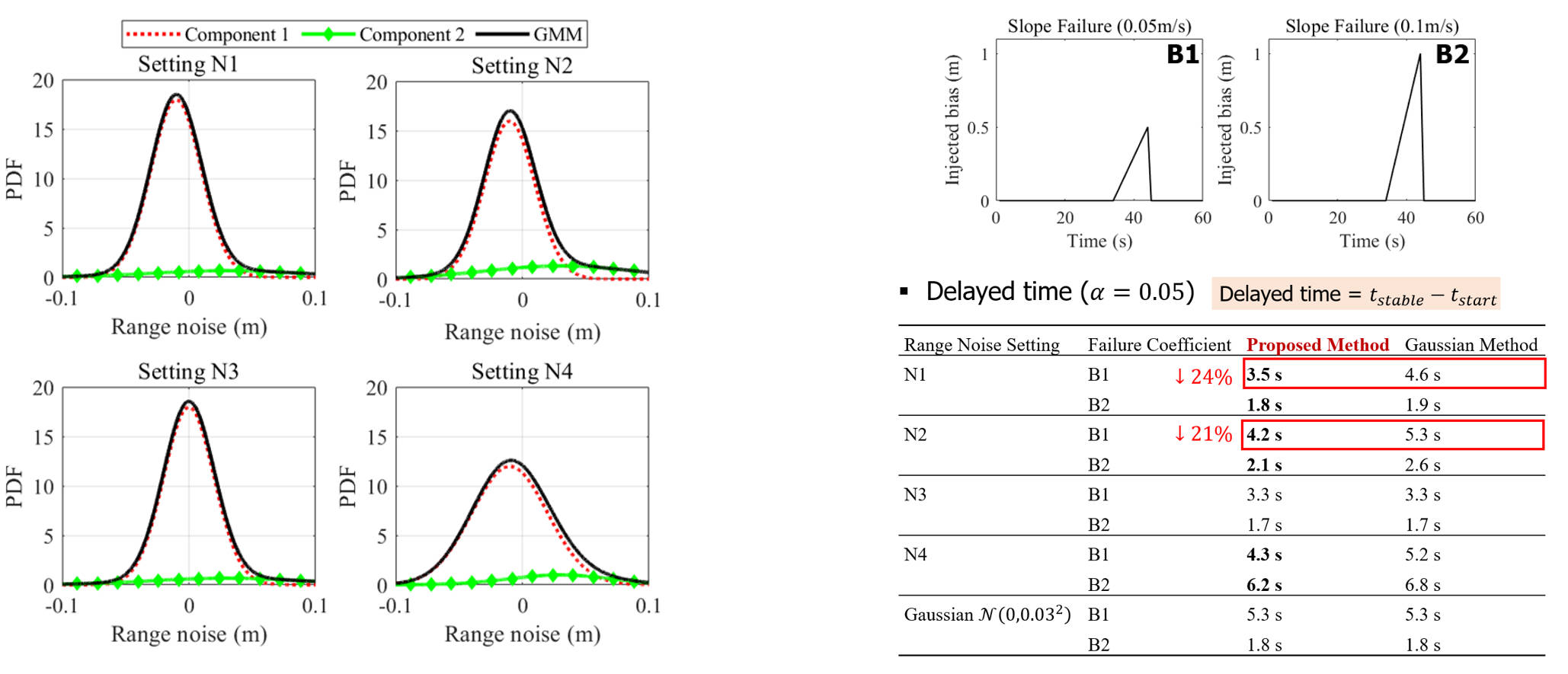 Four non-Gaussian noise settings, two types of slope failure settings, and comparison of the proposed method and the Gaussian method in terms of delayed time.
Four non-Gaussian noise settings, two types of slope failure settings, and comparison of the proposed method and the Gaussian method in terms of delayed time.
DOI: https://doi.org/10.33012/2024.19564
Download Paper Download Slides
Recommended citation:
Yan, P., Wen, W., Huang, F., & Hsu, L. T. (2024). "A Fault Detection Algorithm for LiDAR/IMU Integrated Localization Systems with Non-Gaussian Noises". In Proceedings of the 2024 International Technical Meeting of The Institute of Navigation (pp. 561-574).
BibTeX
@inproceedings{yan2024itm,
author = {Yan, Penggao and Wen, Weisong and Huang, Fan and Hsu, Li-Ta},
title = {A Fault Detection Algorithm for LiDAR/IMU Integrated Localization Systems with Non-Gaussian Noises},
booktitle = {Proceedings of the 2024 International Technical Meeting of The Institute of Navigation},
year = {2024},
pages = {561--574},
doi = {10.33012/2024.19564}
}