
Fault Detection Algorithm for Gaussian Mixture Noises:An Application in LiDAR/IMU Integrated Localization System
Published in NAVIGATION: Journal of the Institute of Navigation, 2024
1) What problem is this paper solving?
Context: Lidar-based localization noise often exhibits heavy-tailed or non-Gaussian behaviors.
Core contribution: Modeling non-Gaussian noise as GMM and deriving a rigorous Chi-squared test.
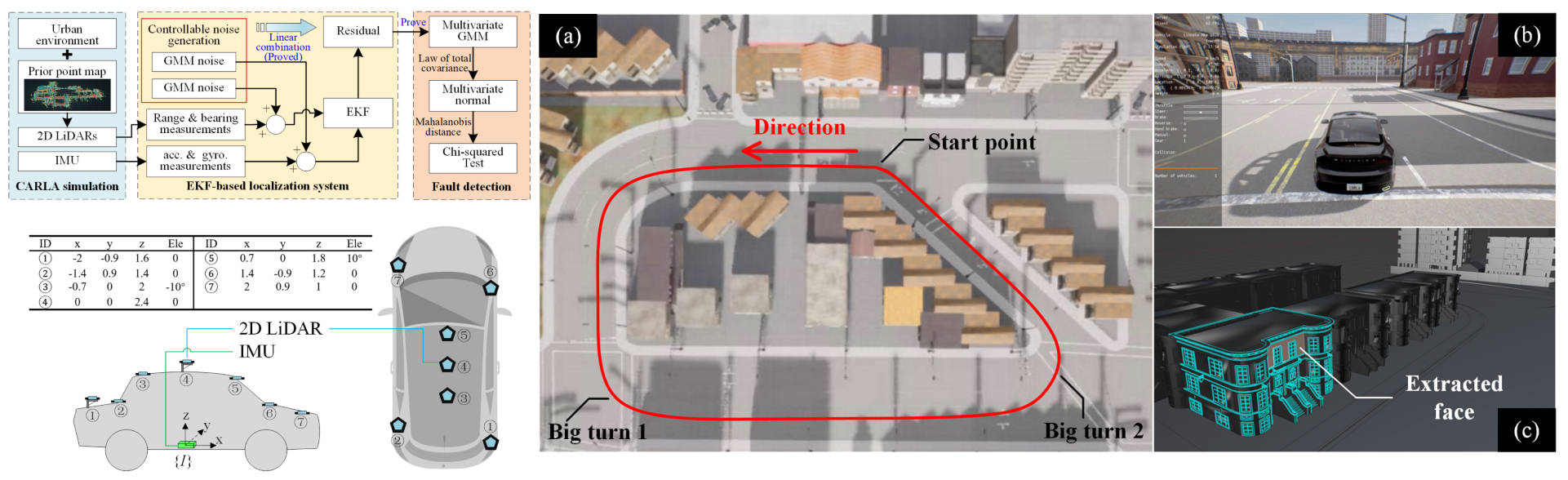
Achieved goal: Reliable fault detection in EKF-based Lidar/IMU systems.
2) Why is this paper important?
What changed: High-precision sensors like LiDAR have complex, non-Gaussian noise characteristics.
Problem created: Conventional Gaussian assumptions lead to poor fault detection performance.
Why current solutions fail: They lack the statistical framework to handle multimodal or heavy-tailed noise.
3) How does this paper solve it?
Contribution 1: Models noise as GMM and propagates it through EKF to establish residual distribution.
Contribution 2: Transforms the GMM residual to approximate a standard multivariate normal for testing.
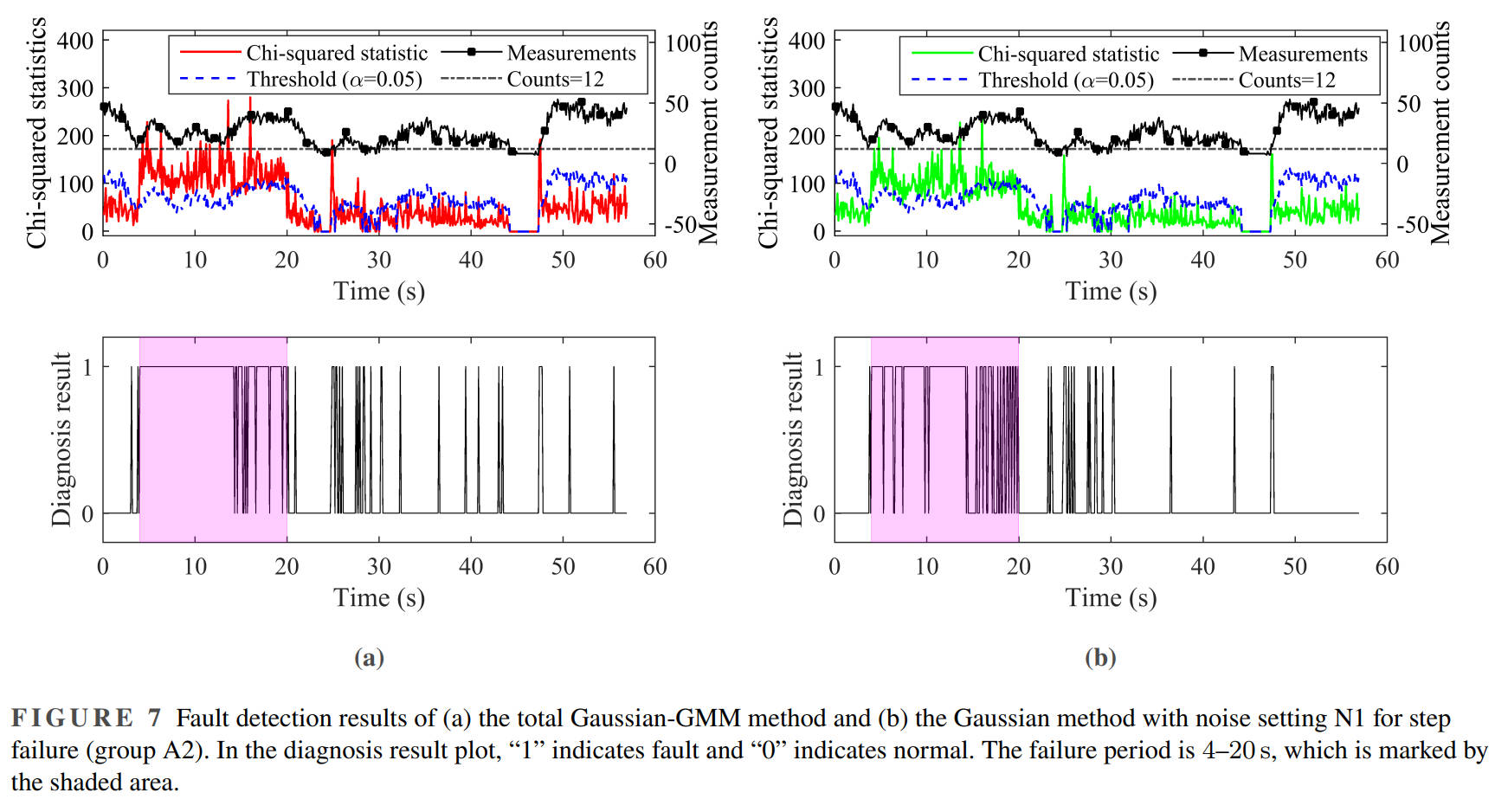
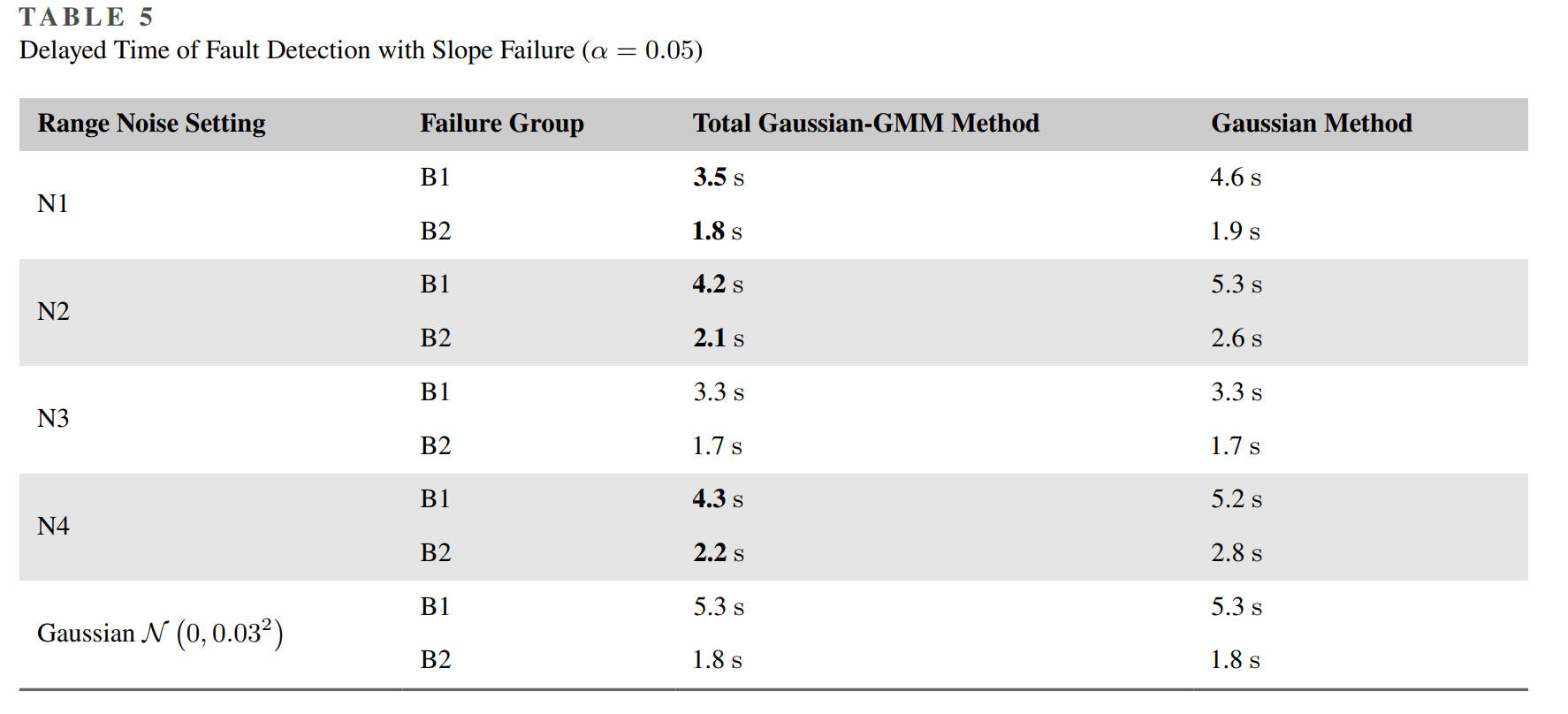
Key result: 30% improvement in detection rate and 17-23% reduction in detection delay.
🎯 Takeaway: Rigorous GMM error propagation enables standard Chi-squared tests to work for non-Gaussian systems.
DOI: https://doi.org/10.33012/navi.684
Recommended citation:
Yan, P., Li, Z., Huang, F., Wen, W., & Hsu, L. T. (2024). "Fault Detection Algorithm for Gaussian Mixture Noises: An Application in LiDAR/IMU Integrated Localization Systems". NAVIGATION: Journal of the Institute of Navigation, 72(1), https://doi.org/10.33012/navi.684
BibTeX
@article{yan2024fdegmm,
author = {Yan, Penggao and Li, Zikai and Huang, Fan and Wen, Weisong and Hsu, Li-Ta},
title = {Fault Detection Algorithm for Gaussian Mixture Noises: An Application in LiDAR/IMU Integrated Localization Systems},
journal = {NAVIGATION: Journal of the Institute of Navigation},
year = {2024},
volume = {72},
number = {1},
doi = {10.33012/navi.684}
}