
Jackknife test for faulty GNSS measurements detection under non-Gaussian noises
Published in ION GNSS+ 2024, 2024
1) What problem is this paper solving?
Context: Mainstream fault detection relies on Gaussian assumptions, which fail in real-world non-Gaussian environments.
Core contribution: A “jackknife detector” based on cross-validation without restrictive distribution assumptions.
Achieved goal: Superior fault detection performance and reliability under non-Gaussian noises.
2) Why is this paper important?
What changed: Real-world GNSS errors in urban areas are often heavy-tailed and non-Gaussian.
Problem created: Gaussian-based methods underestimate risk, while existing non-Gaussian methods lack rigorous guarantees.
Why current solutions fail: They are either unreliable (Gaussian assumption) or computationally expensive (MHSS).
3) How does this paper solve it?
Contribution 1: Proposes a test statistic based on the jackknife technique (linear combination of measurement errors).
Contribution 2: Constructs a hypothesis test with Bonferroni correction for robust fault detection.
Key result: Detected a real-world satellite clock anomaly 8 minutes earlier than the MHSS method.
🎯 Takeaway: A distribution-free, statistically rigorous fault detector that outperforms traditional methods in non-Gaussian reality.
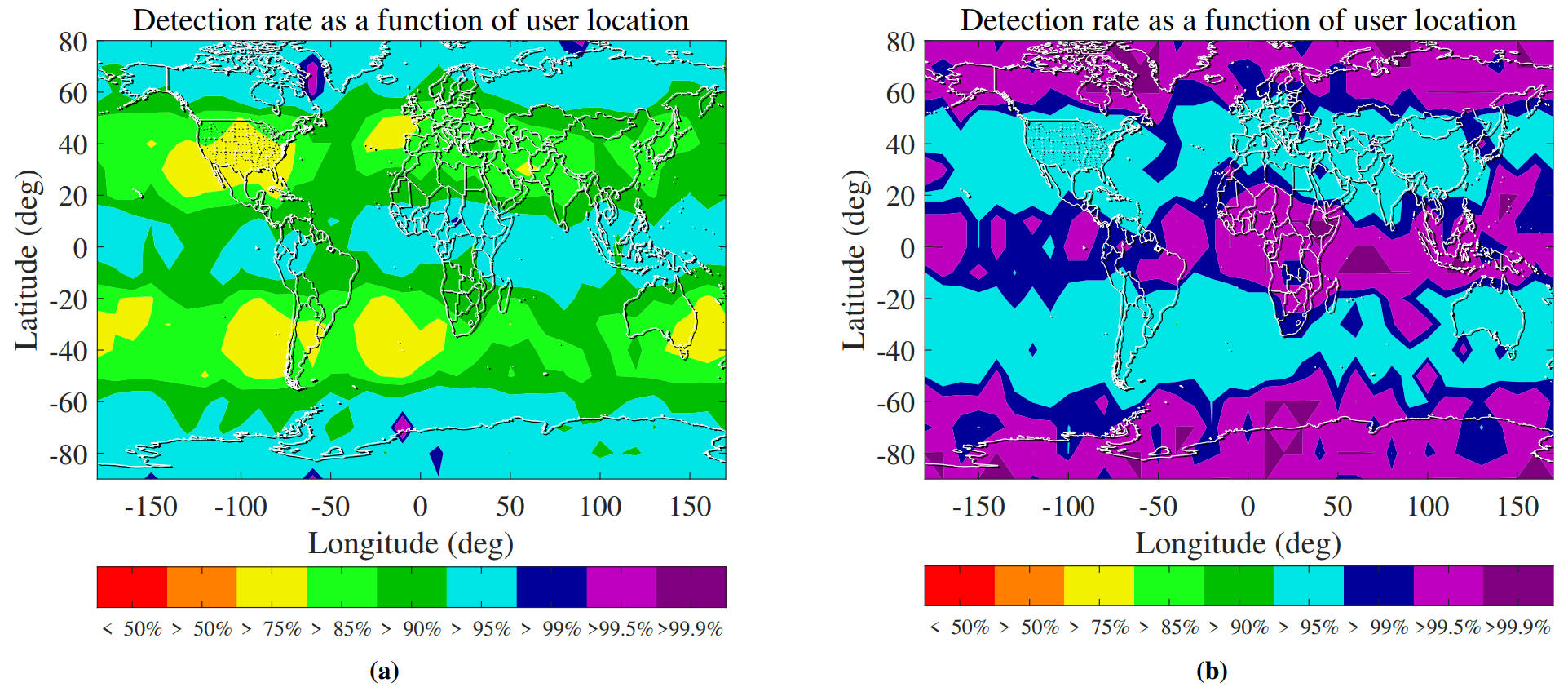 Contour plot of the detection rate of (a) the solution separation detector and (b) the proposed detector with non-Gaussian (Normal Inverse Gaussian) distributed nominal errors.
Contour plot of the detection rate of (a) the solution separation detector and (b) the proposed detector with non-Gaussian (Normal Inverse Gaussian) distributed nominal errors.
- Status: Accepted by ION GNSS+ 2024 as the Student Paper Award
DOI: https://doi.org/10.33012/2024.19837
Download Paper Download Slides
Recommended citation:
Yan, P. (2024). "Jackknife test for faulty GNSS measurements detection under non-Gaussian noises". In ION GNSS+ 2024 (pp. 1619-1641), https://doi.org/10.33012/2024.19837
BibTeX
@inproceedings{yan2024gnss,
author = {Yan, Penggao},
title = {Jackknife test for faulty GNSS measurements detection under non-Gaussian noises},
booktitle = {ION GNSS+ 2024},
year = {2024},
pages = {1619--1641},
doi = {10.33012/2024.19837}
}