
Cauchy-Gaussian Overbound for Heavy-tailed GNSS Measurement Errors
Published in NAVIGATION: Journal of the Institute of Navigation, 2026
1) What problem is this paper solving?
Context: Heavy-tailed GNSS errors (multipath, NLOS) are poorly modeled by standard Gaussian overbounds.
Core contribution: A hybrid Cauchy-Gaussian overbound that uses Cauchy for the sharp core and Gaussian for the tails.
Achieved goal: Tighter, integrity-preserving error bounds for both symmetric and asymmetric heavy-tailed distributions.
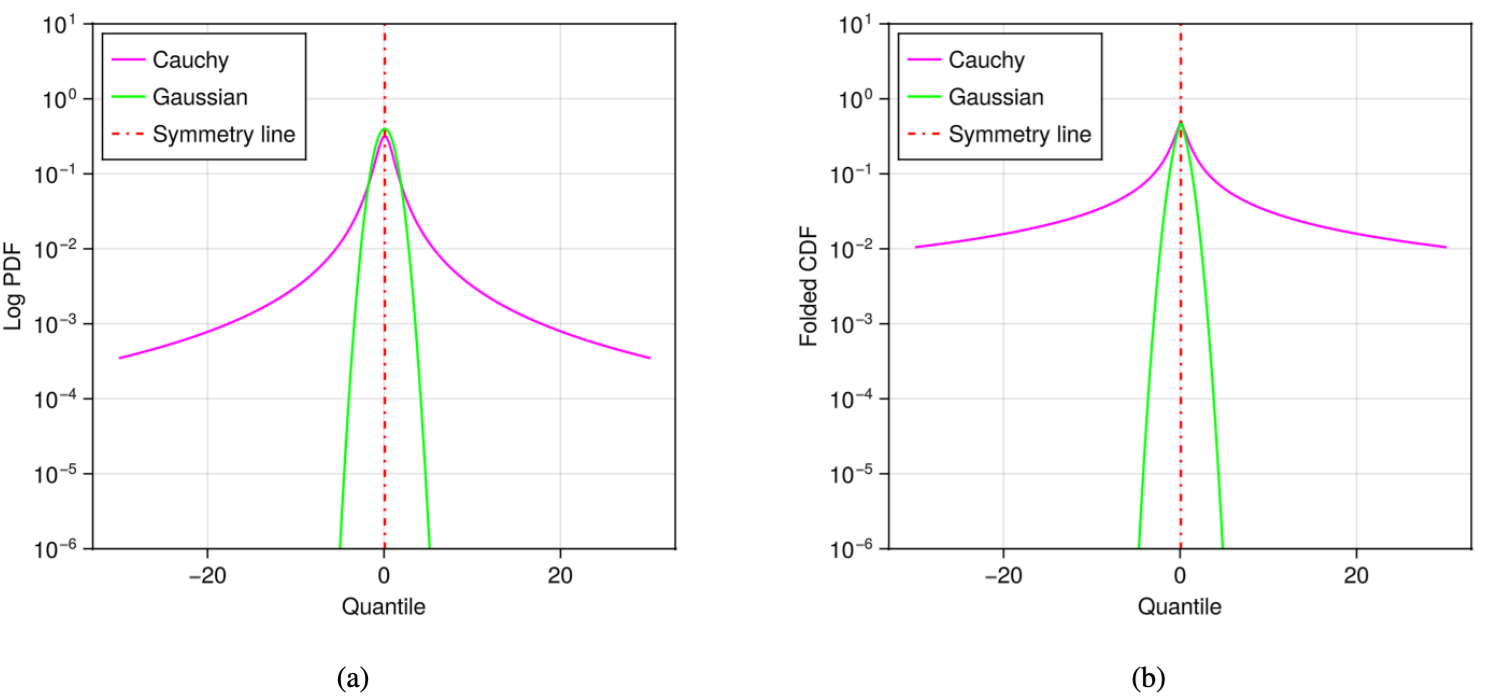 Comparison between the standard Cauchy and Gaussian distributions, through (a) PDF and (b) folded CDF on a logarithmic scale.
Comparison between the standard Cauchy and Gaussian distributions, through (a) PDF and (b) folded CDF on a logarithmic scale.
2) Why is this paper important?
What changed: Urban navigation demands high integrity, but Gaussian bounds are too loose (conservative) for heavy tails.
Problem created: Excessive conservatism leads to huge Protection Levels (PL), making the system unavailable.
Why current solutions fail: Gaussian bounds over-inflate sigma to cover tails.
3) How does this paper solve it?
Contribution 1: Leverages the Cauchy distribution’s sharp peak to tightly bound the error core.
Contribution 2: Transits tangentially to a Gaussian distribution to safely bound the tails.
Key result: Reduced Vertical Protection Level (VPL) by 15% (symmetric errors) and 21–47% (asymmetric errors) vs. baselines.
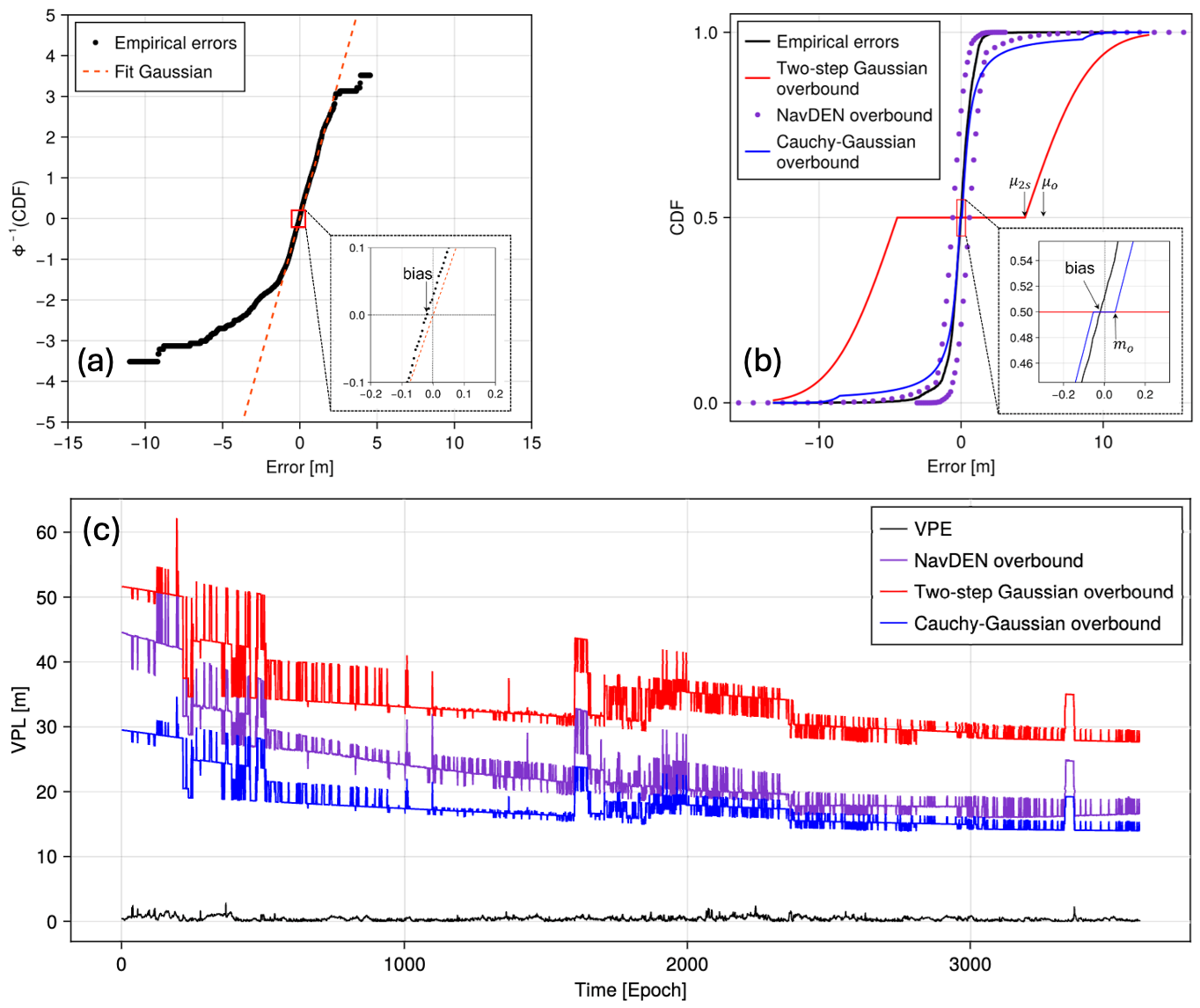 (a) Quantile-scale CDF showing empirical DGNSS error in urban areas are heavy-tailed; (b) CDF of the two-step Gaussian overbound, NavDEN overbound, and the Cauchy-Gaussian overbound; (c) VPL produced by the three overbounds at PHMI of 10^-9.
(a) Quantile-scale CDF showing empirical DGNSS error in urban areas are heavy-tailed; (b) CDF of the two-step Gaussian overbound, NavDEN overbound, and the Cauchy-Gaussian overbound; (c) VPL produced by the three overbounds at PHMI of 10^-9.
🎯 Takeaway: Combining Cauchy sharpness with Gaussian tails creates a tighter, safer bound for urban GNSS integrity.
DOI: https://doi.org/10.33012/navi.749
Recommended citation:
Li, Z., Yan, P., Wen, W., & Hsu, L. T. (2026). "Cauchy-Gaussian Overbound for Heavy-tailed GNSS Measurement Errors". NAVIGATION: Journal of the Institute of Navigation.
BibTeX
@article{li2026cauchy,
author = {Li, Zhengdao and Yan, Penggao and Wen, Weisong and Hsu, Li-Ta},
title = {Cauchy-Gaussian Overbound for Heavy-tailed GNSS Measurement Errors},
journal = {NAVIGATION: Journal of the Institute of Navigation},
year = {2026}
volume = {73},
number = {navi.749},
doi = {10.33012/navi.749}
}