
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
ION ITM 2023
Published:
Attend ION ITM 2023 (24-27 April 2023, Long Beach, CA)
IEEE/ION PLANS 2023
Published:
Attend IEEE/ION PLANS 2023 (24-27 April 2023, Monterey, CA) 
ION ITM 2024
Published:
Invited Paper at ION ITM 2024 (22-25 Jan 2024, Long Beach, CA) 
Pacific PNT 2024
Published:
Attend Pacific PNT 2024 (16-18 April 2024, Honolulu, Hawaii) 
ION GNSS+ 2024 Best Student Paper Award
Published:
Won the “ION GNSS+ Student Paper Award” in the 37th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2024) 
publications
Integration of Vehicle Dynamic Model and System Identified Model for Navigation in Autonomous Mobile Robots
Published in International Technical Meeting 2023, 2023
Sensor-free localization udner extreme conditions 
Recommended citation: Yan, P., Hsu, L. T., & Wen, W. (2023, January). "Integration of Vehicle Dynamic Model and System Identified Model for Navigation in Autonomous Mobile Robots". In Proceedings of the 2023 International Technical Meeting of The Institute of Navigation (pp. 153-160).
Download Paper | Download Slides
Extending Navigation Service under Sensor Failures: An Approach by Integrating System Identification and Vehicle Dynamic Model
Published in 2023 IEEE/ION Position, Location and Navigation Symposium (PLANS), 2023
Introduce the online system identification 
Recommended citation: Yan, P., Hsu, L. T., & Wen, W. (2023). "Extending Navigation Service under Sensor Failures: An Approach by Integrating System Identification and Vehicle Dynamic Model". In 2023 IEEE/ION Position, Location and Navigation Symposium (PLANS) (pp. 630-636). IEEE.
Download Paper | Download Slides
Integration of Vehicle Dynamic Model and System Identification Model for Extending the Navigation Service Under Sensor Failures
Published in IEEE Transactions on Intelligent Vehicles, 2023
Integration of system identification and vehicle dynamic models 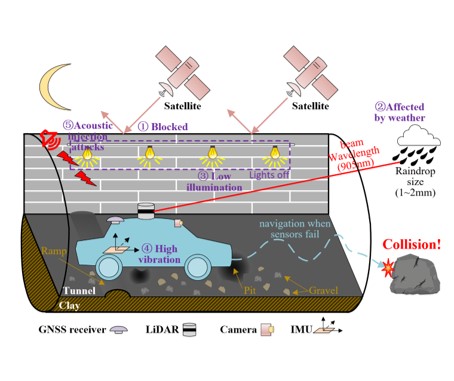
Recommended citation: Yan, P., Wen, W., & Hsu, L. T. (2023). "Integration of Vehicle Dynamic Model and System Identification Model for Extending the Navigation Service Under Sensor Failures". IEEE Transactions on Intelligent Vehicles, 9(1), 2236-2248, https://doi.org/10.1109/TIV.2023.3273185
Download Paper | Download Slides
A Fault Detection Algorithm for LiDAR/IMU Integrated Localization Systems with Non-Gaussian Noises
Published in International Technical Meeting 2024, 2024
Detecting faulty measurements in EKF-based LiDAR/IMU integrated localization systems under non-Gaussian nominal error
Recommended citation: Yan, P., Wen, W., Huang, F., & Hsu, L. T. (2024). "A Fault Detection Algorithm for LiDAR/IMU Integrated Localization Systems with Non-Gaussian Noises". In Proceedings of the 2024 International Technical Meeting of The Institute of Navigation (pp. 561-574).
Download Paper | Download Slides
Bounding the Heavy-tailed DGNSS Error by Leveraging Membership Weights Analysis of Gaussian Mixture Model
Published in Pacific PNT 2024, 2024
Non-Gaussian overbound for heavy-tailed DGNSS error 
Recommended citation: Yan, P., Zhong, Y., & Hsu, L. T. (2024, April). "Bounding the Heavy-Tailed Pseudorange Error by Leveraging Membership Weights Analysis of Gaussian Mixture Model". In Proceedings of the ION 2024 Pacific PNT Meeting (pp. 541-555).
Download Paper | Download Slides
Subspace-based Adaptive GMM Error Modeling for Fault-Aware Vehicular GNSS Positioning in Urban Canyons
Published in IEEE Transactions on Intelligent Vehicles, 2024
Simultaneous adaptive error modeling and fault detection and exclusion 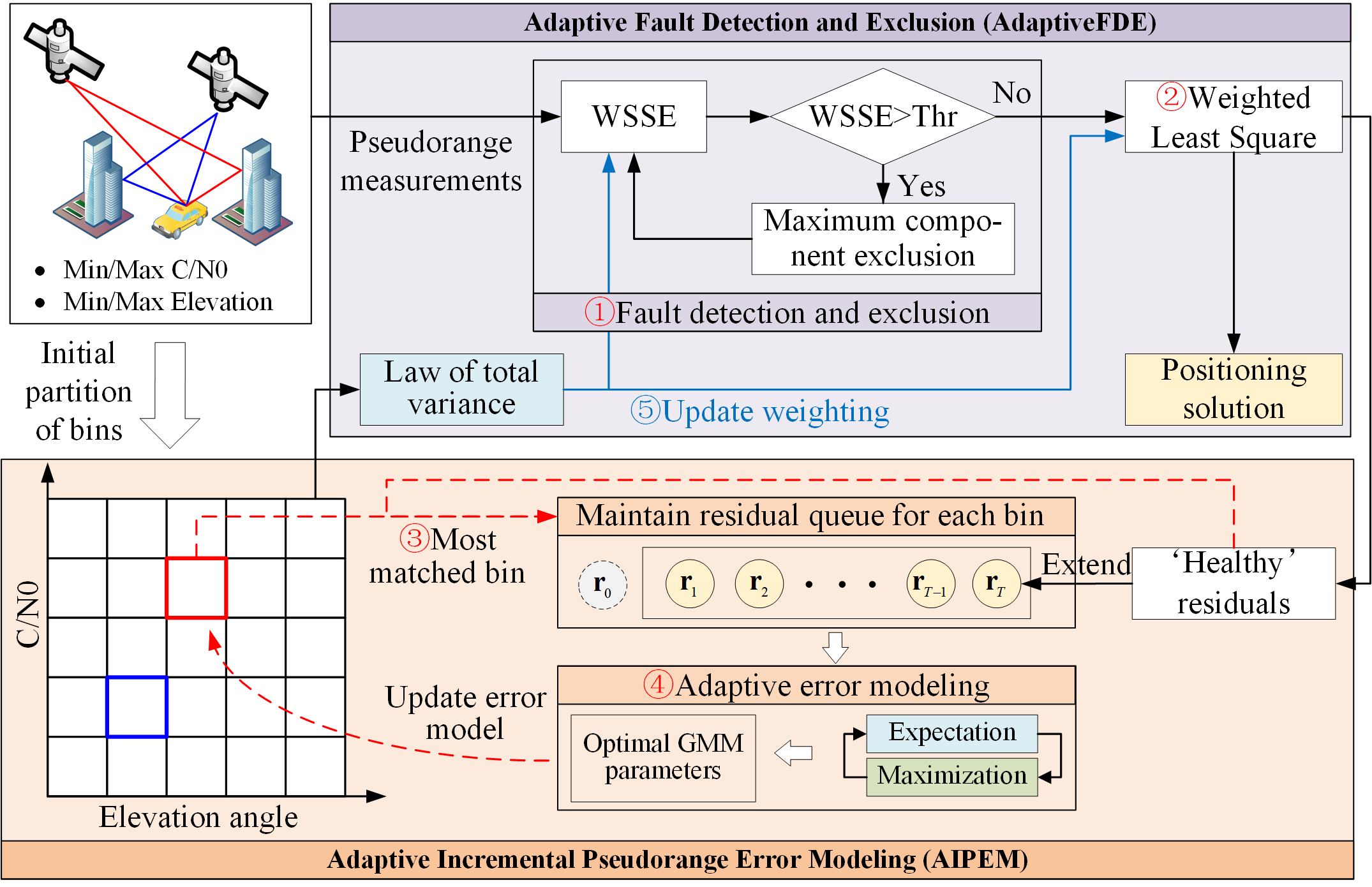
Recommended citation: Yan, P., Xia, X., Brizzi, M., Wen, W., & Hsu, L. T. (2024). "Subspace-based Adaptive GMM Error Modeling for Fault-Aware Pseudorange-based Positioning in Urban Canyons". IEEE Transactions on Intelligent Vehicles, http://dx.doi.org/10.1109/TIV.2024.3450198
Download Paper | Download Slides
Principal Gaussian Overbound for Heavy-tailed Error Bounding
Published in IEEE Transactions on Aerospace and Electronic Systems, 2024
A conservative yet sharp non-Gaussian overbound for heavy-tailed error distributions 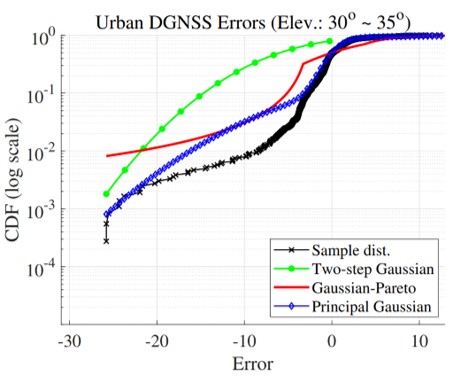
Recommended citation: Yan, P., Zhong, Y., & Hsu, L. T. (2024). "Principal Gaussian Overbound for Heavy-tailed Error Bounding". IEEE Transactions on Aerospace and Electronic Systems, 61(1), 829-852, http://dx.doi.org/10.1109/TAES.2024.3448405
Download Paper | Download Slides
Jackknife test for faulty GNSS measurements detection under non-Gaussian noises
Published in ION GNSS+ 2024, 2024
Theoretic-guanrateed non-Gaussian detector 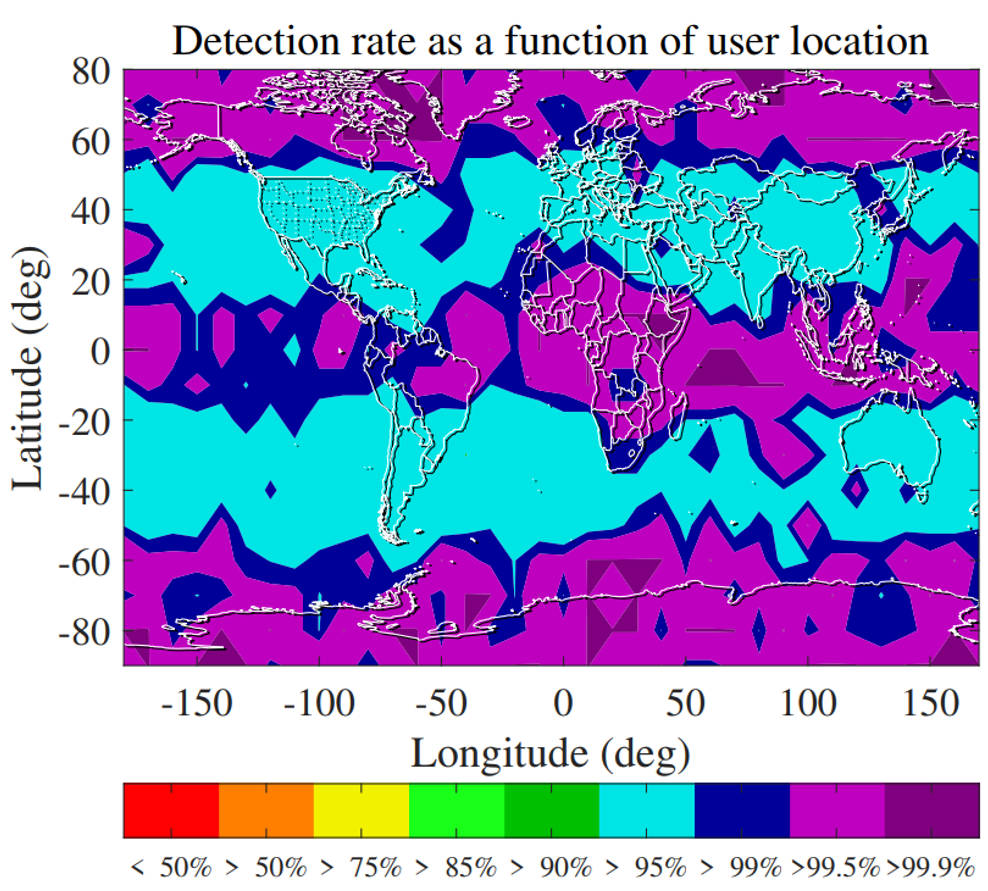
Recommended citation: Yan, P. (2024). "Jackknife test for faulty GNSS measurements detection under non-Gaussian noises". In ION GNSS+ 2024 (pp. 1619-1641), https://doi.org/10.33012/2024.19837
Download Paper | Download Slides
Fault Detection Algorithm for Gaussian Mixture Noises:An Application in LiDAR/IMU Integrated Localization System
Published in NAVIGATION: Journal of the Institute of Navigation, 2024
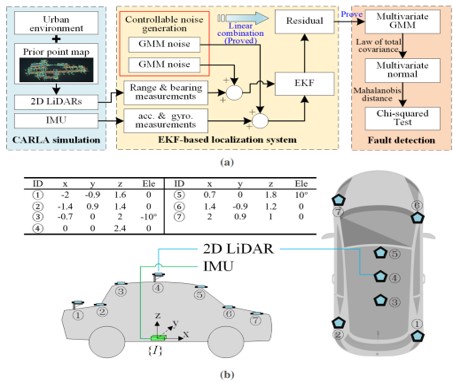
Recommended citation: Yan, P., Li, Z., Huang, F., Wen, W., & Hsu, L. T. (2024). "Fault Detection Algorithm for Gaussian Mixture Noises: An Application in LiDAR/IMU Integrated Localization Systems". NAVIGATION: Journal of the Institute of Navigation, 72(1), https://doi.org/10.33012/navi.684
Download Paper | Download Slides
Multiple Faults Isolation For Multi-Constellation GNSS Positioning through Incremental Expansion of Consistent Measurements
Published in IEEE Sensors Journal, 2024
An expanding approach to detect and isolate multiple faulty measurements in pseudorange-based positioning systems 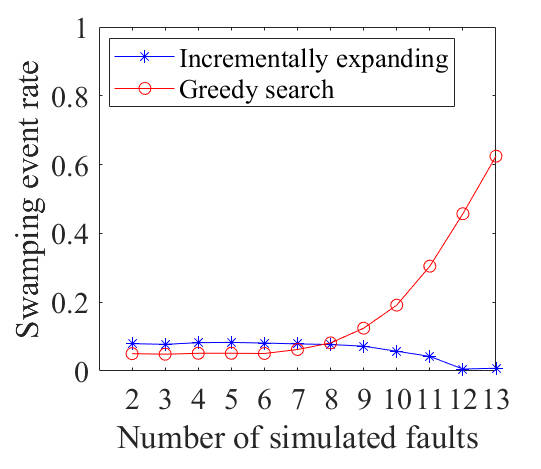
Recommended citation: Yan, P., Hu, Y., Wen, W., & Hsu, L. T. (2025). "Multiple Faults Isolation For Multi-Constellation GNSS Positioning through Incremental Expansion of Consistent Measurements". IEEE Sensors Journal, 25(4), https://doi.org/10.1109/JSEN.2024.3524434
Download Paper | Download Slides
talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Conference Proceeding talk 3 on Relevant Topic in Your Field
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.