ION ITM 2023
Published:
Attend ION ITM 2023 (24-27 April 2023, Long Beach, CA)

Published:
Attend ION ITM 2023 (24-27 April 2023, Long Beach, CA)
Published:
Attend IEEE/ION PLANS 2023 (24-27 April 2023, Monterey, CA) 
Published:
Invited Paper at ION ITM 2024 (22-25 Jan 2024, Long Beach, CA) 
Published:
Attend Pacific PNT 2024 (16-18 April 2024, Honolulu, Hawaii) 
Published:
Won the “ION GNSS+ Student Paper Award” in the 37th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2024) 
Published in International Technical Meeting 2023, 2023
Sensor-free localization udner extreme conditions 
Recommended citation: Yan, P., Hsu, L. T., & Wen, W. (2023, January). "Integration of Vehicle Dynamic Model and System Identified Model for Navigation in Autonomous Mobile Robots". In Proceedings of the 2023 International Technical Meeting of The Institute of Navigation (pp. 153-160).
Download Paper | Download Slides
Published in 2023 IEEE/ION Position, Location and Navigation Symposium (PLANS), 2023
Introduce the online system identification 
Recommended citation: Yan, P., Hsu, L. T., & Wen, W. (2023). "Extending Navigation Service under Sensor Failures: An Approach by Integrating System Identification and Vehicle Dynamic Model". In 2023 IEEE/ION Position, Location and Navigation Symposium (PLANS) (pp. 630-636). IEEE.
Download Paper | Download Slides
Published in IEEE Transactions on Intelligent Vehicles, 2023
Integration of system identification and vehicle dynamic models 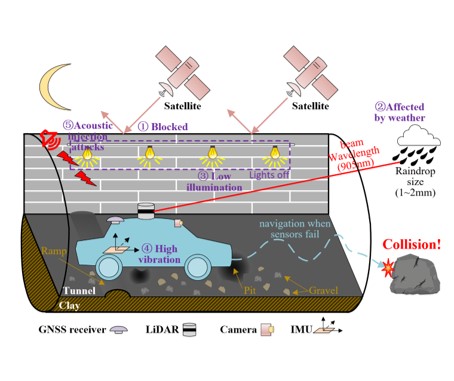
Recommended citation: Yan, P., Wen, W., & Hsu, L. T. (2023). "Integration of Vehicle Dynamic Model and System Identification Model for Extending the Navigation Service Under Sensor Failures". IEEE Transactions on Intelligent Vehicles, 9(1), 2236-2248, https://doi.org/10.1109/TIV.2023.3273185
Download Paper | Download Slides
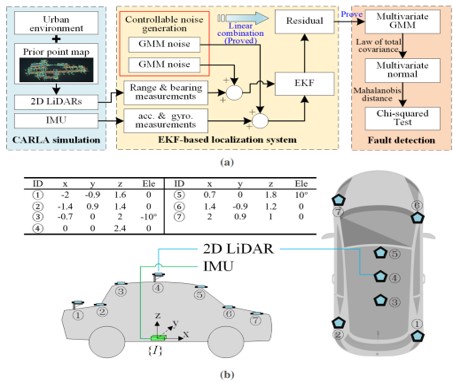
Published in International Technical Meeting 2024, 2024
Detecting faulty measurements in EKF-based LiDAR/IMU integrated localization systems under non-Gaussian nominal error
Recommended citation: Yan, P., Wen, W., Huang, F., & Hsu, L. T. (2024). "A Fault Detection Algorithm for LiDAR/IMU Integrated Localization Systems with Non-Gaussian Noises". In Proceedings of the 2024 International Technical Meeting of The Institute of Navigation (pp. 561-574).
Download Paper | Download Slides
Published in Pacific PNT 2024, 2024
Non-Gaussian overbound for heavy-tailed DGNSS error 
Recommended citation: Yan, P., Zhong, Y., & Hsu, L. T. (2024, April). "Bounding the Heavy-Tailed Pseudorange Error by Leveraging Membership Weights Analysis of Gaussian Mixture Model". In Proceedings of the ION 2024 Pacific PNT Meeting (pp. 541-555).
Download Paper | Download Slides
Published in IEEE Transactions on Intelligent Vehicles, 2024
Simultaneous adaptive error modeling and fault detection and exclusion 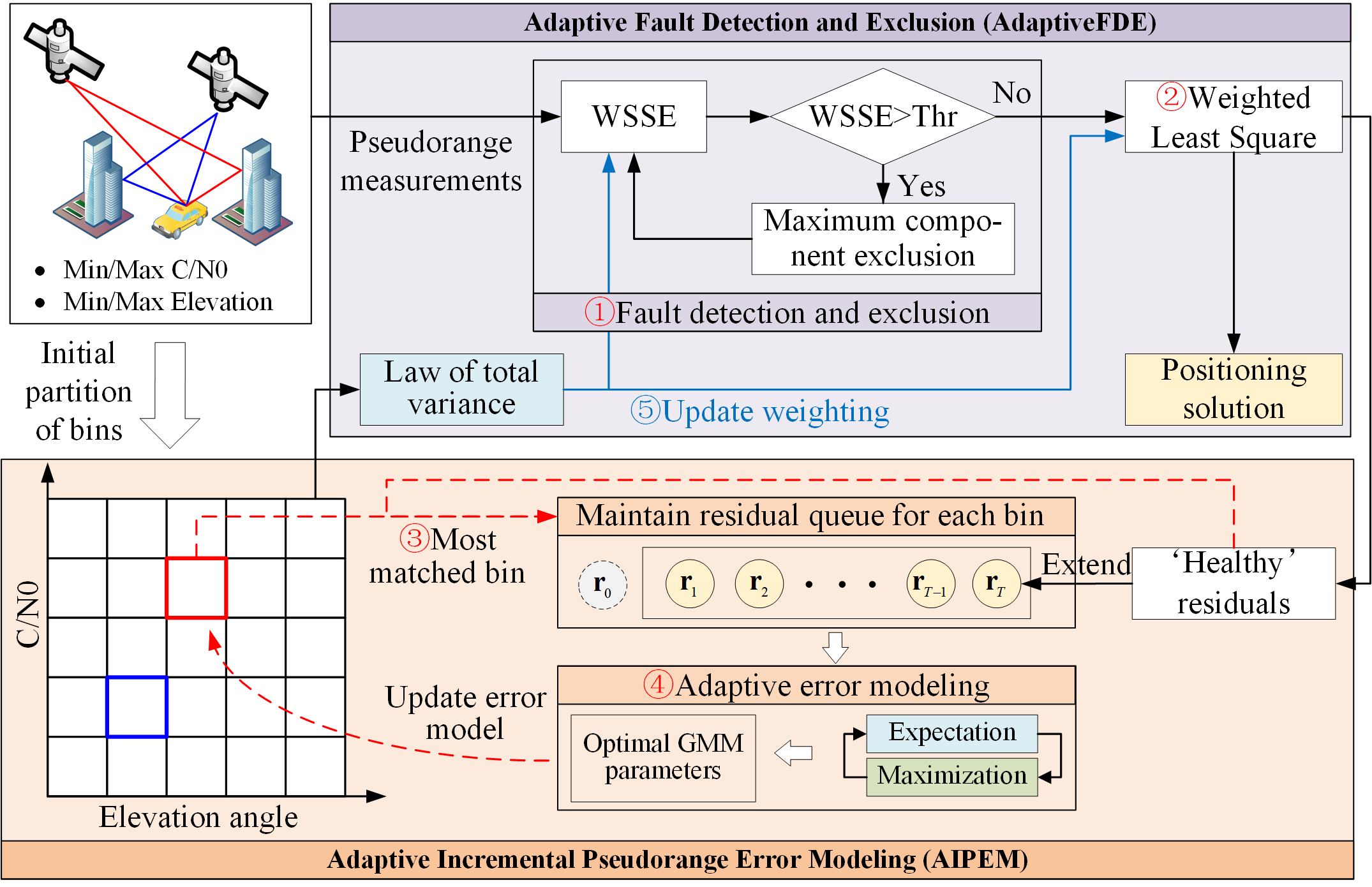
Recommended citation: Yan, P., Xia, X., Brizzi, M., Wen, W., & Hsu, L. T. (2024). "Subspace-based Adaptive GMM Error Modeling for Fault-Aware Pseudorange-based Positioning in Urban Canyons". IEEE Transactions on Intelligent Vehicles, http://dx.doi.org/10.1109/TIV.2024.3450198
Download Paper | Download Slides
Published in IEEE Transactions on Aerospace and Electronic Systems, 2024
A conservative yet sharp non-Gaussian overbound for heavy-tailed error distributions 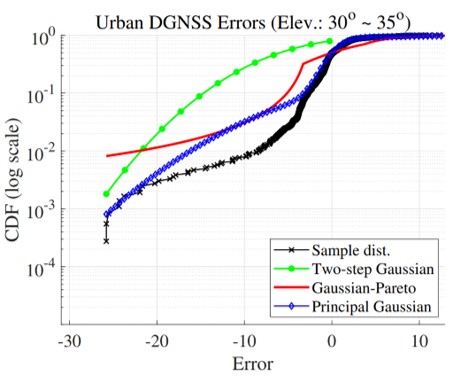
Recommended citation: Yan, P., Zhong, Y., & Hsu, L. T. (2024). "Principal Gaussian Overbound for Heavy-tailed Error Bounding". IEEE Transactions on Aerospace and Electronic Systems, 61(1), 829-852, http://dx.doi.org/10.1109/TAES.2024.3448405
Download Paper | Download Slides
Published in ION GNSS+ 2024, 2024
Theoretic-guanrateed non-Gaussian detector 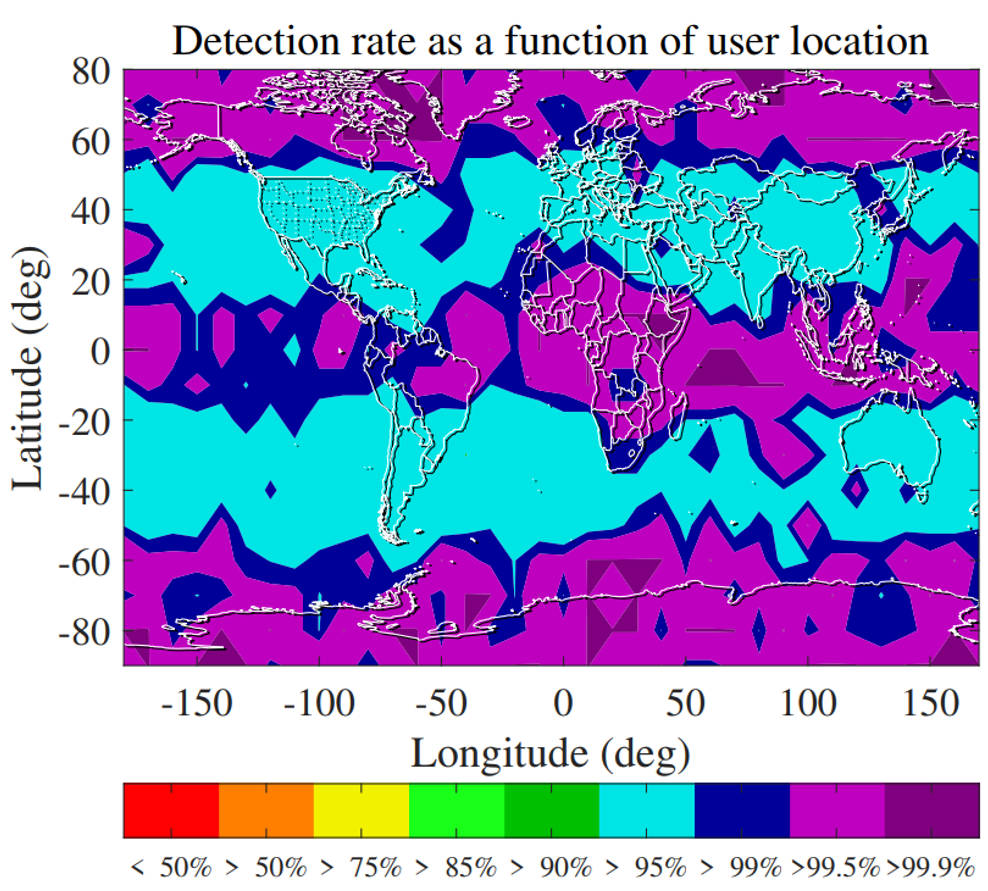
Recommended citation: Yan, P. (2024). "Jackknife test for faulty GNSS measurements detection under non-Gaussian noises". In ION GNSS+ 2024 (pp. 1619-1641), https://doi.org/10.33012/2024.19837
Download Paper | Download Slides
Published in NAVIGATION: Journal of the Institute of Navigation, 2024
Recommended citation: Yan, P., Li, Z., Huang, F., Wen, W., & Hsu, L. T. (2024). "Fault Detection Algorithm for Gaussian Mixture Noises: An Application in LiDAR/IMU Integrated Localization Systems". NAVIGATION: Journal of the Institute of Navigation, 72(1), https://doi.org/10.33012/navi.684
Download Paper | Download Slides
Published in IEEE Sensors Journal, 2024
An expanding approach to detect and isolate multiple faulty measurements in pseudorange-based positioning systems 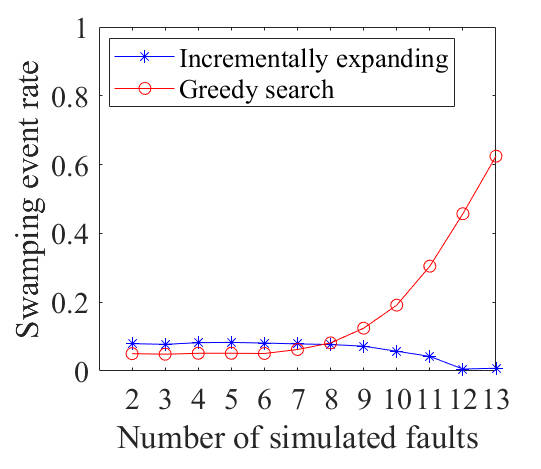
Recommended citation: Yan, P., Hu, Y., Wen, W., & Hsu, L. T. (2025). "Multiple Faults Isolation For Multi-Constellation GNSS Positioning through Incremental Expansion of Consistent Measurements". IEEE Sensors Journal, 25(4), https://doi.org/10.1109/JSEN.2024.3524434
Download Paper | Download Slides
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.